
Start » Filter Reference » Computer Vision » Hough Transform » DetectMultipleCircles
 Advanced
Advanced| Module: | FoundationBasic |
|---|
Finds circles of a given radius in the input image using Hough Transform.
Applications
| Name | Type | Range | Description | |
|---|---|---|---|---|
 |
inImage | Image | Input image | |
|
inRoi | Region* | Input region of interest | |
|
inRadius | Real | 0.0 -  |
Circles' radius |
|
inMaxOverlap | Real | 0.0 - 1.0 | Maximum accepted overlapping coefficient |
|
inMinScore | Real | 0.0 - |
Minimum matching score |
|
inEdgeThreshold | Real | Minimum accepted edge magnitude | |
 |
outCircles | HoughCircleArray | Found circles | |
 |
diagGradientMagnitudeImage | Image | Visualized gradients magnitude of an input image | |
|
diagScoreImage | Image | Calculated score for each pixel of an input image | |
Description
The operation detects circular objects of given radius (in pixels) in the inImage using the Hough Transform approach. The output array is ordered from best matching to worst matching results.
The parameter inMaxOverlap defines how much the detected circles can overlap. The value of 0 means no overlapping is allowed, and also that each circle must be fully contained in the search ROI, whereas the value of 1 allows full overlapping.
Hints
- Connect an input image to the inImage input.
- Define the expected circle radius on the inRadius input. Use the Ruler tool on an image preview if you are not sure.
- Set inEdgeThreshold to define the minimum strength of edges that will be taken into account. Verify this value with the diagGradientMagnitudeImage output.
- Experimentally set the inMinScore value, whose meaning is more or less "the number of pixels voting for a particular object location".
Examples
 |
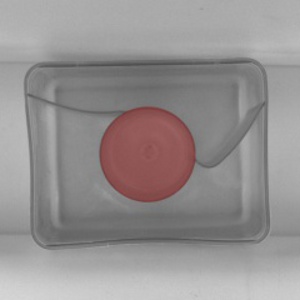 |
DetectMultipleCircles performed on the sample image.
Hardware Acceleration
This operation supports automatic parallelization for multicore and multiprocessor systems.
Complexity Level
This filter is available on Advanced Complexity Level.
Filter Group
This filter is member of DetectCircles filter group.
See Also
- DetectSingleCircle – Finds the strongest circle of a given radius in the input image.
- DetectLines – Finds lines in an image using Hough Transform.
- DetectPaths – Finds a specified shape in an image using Hough Transform.
- DetectSegments – Finds segments in an image using Hough Transform.