
- 商品検索:カテゴリ
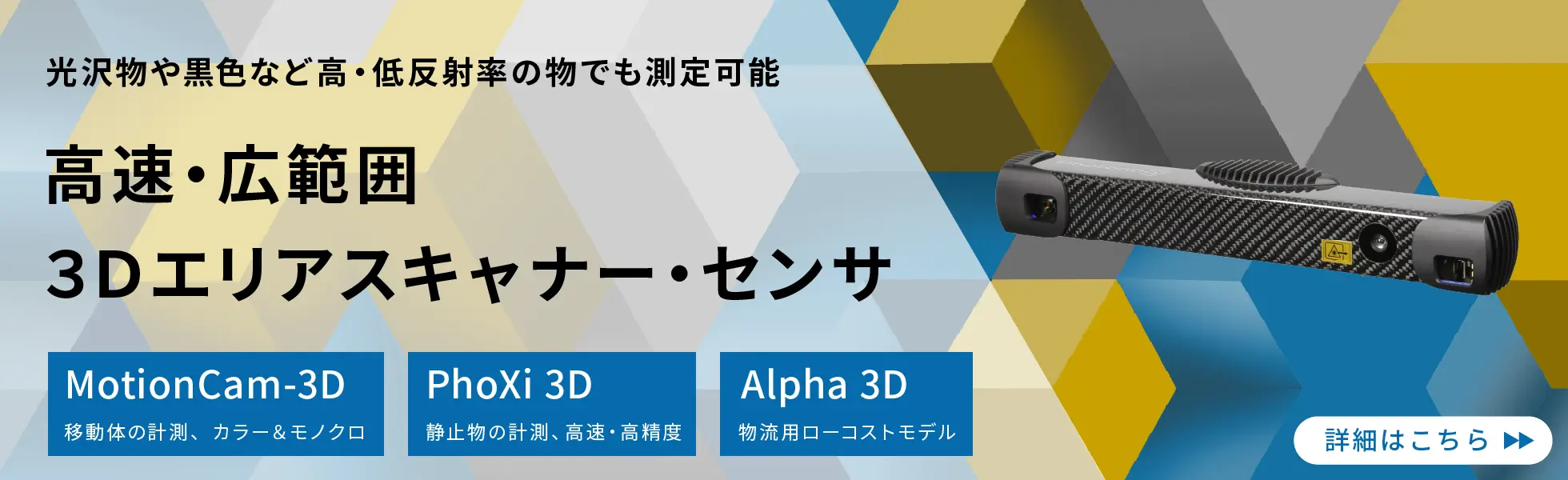
- 産業用3Dセンサ・システム
- 産業用・協働ロボットの3D視覚誘導ガイド・ソリューション
- ビンピッキング・バラ積みピッキング Bin Picking Studio
ビンピッキング・バラ積みピッキング
ソリューション名
Bin Picking Studio
ソリューション名
Bin Picking Studio
高精度3Dカメラ + 産業用・協働ロボットのソリューション
3Dカメラ
様々なサイズとスキャン範囲に対応し、ビンピッキングに最適化された機能を搭載した3Dスキャナ・カメラ。
ローカライゼーション
スマートメモリやクイックスキャンなどビンピッキング用に独自開発した機能を備えたCADベースのローカリゼーションアルゴリズム。
パスプランニング
6軸マニピュレータ向けに最適化されたパスプランニング機能。衝突リスクのない環境では速度向上のために衝突チェックを無効にするオプションあり。
ロボット
インターフェース
多種類のコマンドをサポートする汎用的で幅広いロボット・インターフェース。
Photoneo社のBin Picking Studioは、次世代のスマート・ファクトリーや自動車工場・組み立て工程の自動化向けに、バラ積みピッキングのソリューションを提供します。バラ積みピッキング(ビンピッキング)は、ランダムに配置された未整理の部品や材料をロボットでピッキングし、製造生産ラインなどへ供給することを指します。バラ積みピッキングを行うためには多様な種類の部品や材料を高速・広範囲に検出できる正確な3Dエリアスキャナーと、安全なオブジェクト抽出のためにロボットを誘導できるインテリジェンスシステムが必要になります。Bin Picking Studioはピッキングを行うソフトウェアとビジョンコントローラ(PC)をセットで提供し、オブジェクト(製品・部品)学習、ロボットと3Dスキャナー・カメラ間のキャリブレーションおよび座標変換、仮想空間でのデバッグテストまでを簡単に実現することができます。
ビンピッキング
衝突回避機能を備えた高速CADベースのビンピッキング機能。特定のロボットコード(ロボット モジュール)を含む対応が可能です。

マルチビュー・ビンピッキング
幅が薄いL字型やU字型の金属板は、一つの視点からの測定は三次元情報が十分ではありません。高速のマルチビュー・スキャン(多視点スキャン)により完全な3Dデータが得られます。

マルチビューのスキャンは、複数の3Dスキャナーを使うか、一つの3Dスキャナーを移動させることで測定が行えます。
お客様のピッキングソリューションが
完成!
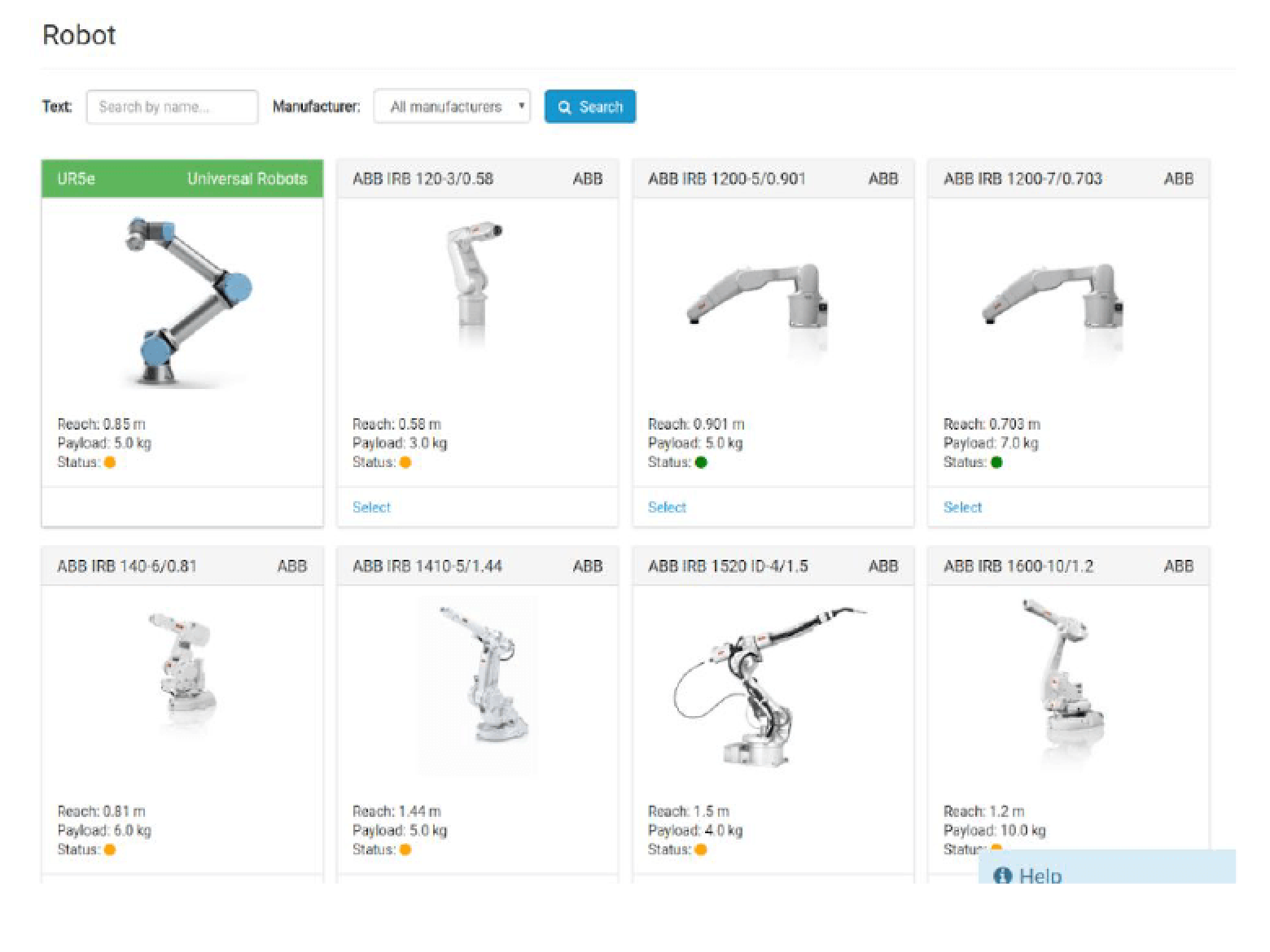
1.ロボットの選択
2.グリッパーのアップロード
グリッピングツールのCADモデルをBin Picking Studioにアップロードします。グリッパーのモデルは、Bin Picking Studio内にある仮想環境でツール位置の構成に使用されます。
3.ピッキング製品(対象物)・オブジェクトのアップロード
ビンピッキングのグリップ位置をプランニングするため、ピッキングするオブジェクト(製品・部品)のCADモデルをBin Picking Studioにアップロードし、仮想環境での設定作業を開始できます
4.グリッピングとツールポイントのセットアップ
ビンピッキングのセットアップは、「グリッパーがオブジェクトをどこで、どのように、つかむか」のポイント選択から始まります。Bin Picking Studioは、シンプルな視覚的なプロセスで設定が行うことができ、複雑な計算は必要がありません。どのようなタスクでも完全なサポートを提供します。
5.ビンピッキング実施の場所をロード
このステップでは、Bin Picking Studioにピッキングを実行する場所を知らせます。ピッキングセル・箱のCADモデルをアップロード後、それを読み込むだけで簡単に完了します。Bin Picking Studioは作業に使用できる視覚化した3D情報を提供します。
6.オブジェクトの位置をセットアップ
Bin Picking Studioには、独自のアルゴリズムでオブジェクト(製品・部品)の位置を特定できる組み込みエンジンが実装されています。CADマッチング・アプローチに基づくアルゴリズムは、処理速度と堅牢性を重視されるビンピッキングでアプリケーション用に開発・最適化されています。
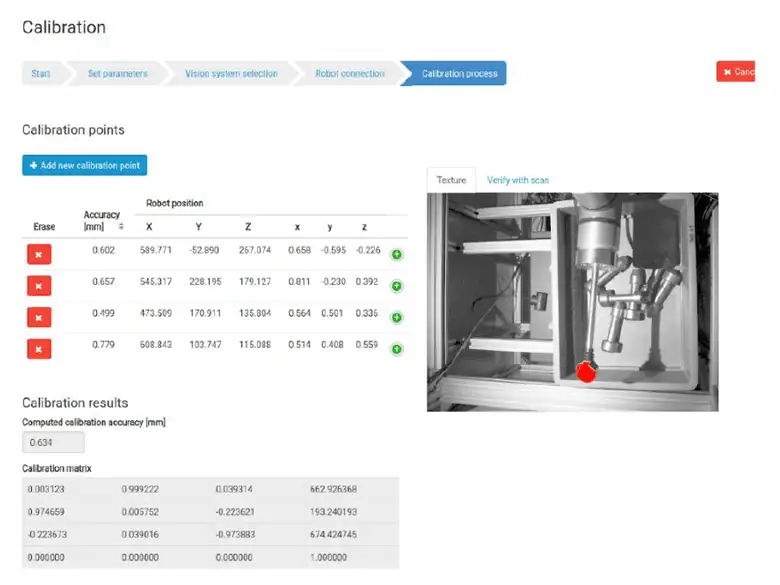
7.ロボットと3Dスキャナー・カメラのキャリブレーション
ロボットとのキャリブレーションは簡単になりました。Bin Picking Studioでは、球形の丸いオブジェクト1つでキャリブレーションが実施できます。直感的なガイド付きプログラムを使用して、3Dスキャナー・カメラとロボットをキャリブレーションし同期をとります。キャリブレーション全体を通じて、視覚的なフィードバックをすぐに受け取ることができ、それを検証して確認・評価することができます。
8.インタラクティブ・デバッギング
最後に、Bin Picking Studioの仮想環境内で高度なデバッグツールを活用しテストします。これにより、お客様のソリューションがどれだけ適切に準備できたかを確認することができます。
| 商品コード(型番) | 構成/内容 | 価格 | |
|---|---|---|---|
| ビジョンシステム | Bin Picking Studio | ビンピッキング用ソフトウェア+ビジョンコントローラ | お問い合わせ |
| スキャナー | 3Dスキャナー・センサ | Photoneo社 MotionCam-3D / PhoXi 3D / Alpha 3D | お問い合わせ |
構成品目

オプション品
| 商品コード(型番) | 構成/内容 | 価格 | |
|---|---|---|---|
| ビジョンシステム (有償モジュール) |
AnyPick module for Boxes (Depalletization) | デパレタイズ用モジュール (Bin Picking / Locator Studio用) |
お問い合わせ |
| MultiView module | マルチビュー用モジュール (Bin Picking / Locator Studio用) |
お問い合わせ |
対応する3Dスキャナー・センサ
ご利用可能な産業用・協働ロボットメーカー
Photoneo社の次世代ファクトリーオートメーションや自動化物流倉庫向けのソリューションでは、3Dスキャナー・カメラが専用のコントローラー経由で各社産業用ロボットや協働ロボットのメーカー・モデルに対応しています。対応モデルは下記メーカーの一覧をご確認ください。
-
ABB
 対応モデル一覧
対応モデル一覧ABB社ロボット 対応モデル
- CRB 15000-10/1.52 *
- CRB 15000-5/0.95 *
- IRB 1100-4/0.475
- IRB 1100-4/0.58
- IRB 1200-5/0.901
- IRB 1200-7/0.703
- IRB 120-3/0.58
- IRB 1300-11/0.9
- IRB 1300-12/1.4
- IRB 1300-7/1.4
- IRB 140-6/0.81
- IRB 1410-5/1.44
- IRB 1520 ID-4/1.5
- IRB 1600-10/1.2
- IRB 1600-10/1.45
- IRB 1600-6/1.2
- IRB 1600-6/1.45
- IRB 1660 ID-6/1.55
- IRB 2400-10/1.55
- IRB 2400-12/1.55
- IRB 2400-20/1.55
- IRB 2600-12/1.65
- IRB 2600-12/1.85
- IRB 2600-20/1.65
- IRB 2600 ID-15/1.85
- IRB 2600 ID-8/2
- IRB 4400-60/1.95
- IRB 4600-20/2.51
- IRB 4600-40/2.55
- IRB 4600-45/2.05
- IRB 4600-60/2.05
- IRB 6620-150/2.2
- IRB 6620 LX-150/1.9 *
- IRB 6640-130/3.2
- IRB 6640-185/2.8
- IRB 6640-235/2.55
- IRB 6700-150/3.2
- IRB 6700-155/2.85
- IRB 6700-200/2.6
- IRB 6700-205/2.8
- IRB 6700-235/2.65
- IRB 6700-245/3
- IRB 6700-300/2.7
- IRB 6700 LeanID-145/3.2
- IRB 6700 LeanID-220/2.65
- IRB 6700 LeanID-235/2.65
- IRB 6700 LeanID-300/2.7
- IRB 7600-150/3.5
- IRB 7600-325/3.1
- IRB 7600-340/2.8
- IRB 7600-400/2.55
- IRB 7600-500/2.55
- IRB 6650s-90/3.9
* Rapid IKはサポートされていません
-
KUKA
 対応モデル一覧
対応モデル一覧KUKA社ロボット 対応モデル

- KR 10 R1100-2
- KR 10 R1100 sixx
- KR 6 R700 sixx
- KR 6 R900 sixx
- KR 10 R1420
- KR 120 R2500 PRO
- KR 120 R2700-2
- KR 120 R3100-2
- KR 12 R1800-2
- KR 150 R2700 -2
- KR 160 R1570 nano
- KR 16-2
- KR 16-3
- KR 16 R1610
- KR 16 R1610-2
- KR 16 R2010
- KR 180 R2500 extra
- KR 20-3
- KR 20 R1810
- KR 210 R2700-2 F
- KR 210 R2700 extra
- KR 210 R3100-2
- KR 22 R1610-2
- KR 240 R2700 prime
- KR 240 R2900 ultra
- KR 270 R2700 ultra F
- KR 270 R3100
- KR 30-3
- KR 30 L16-2
- KR 30 R2100 ultra
- KR 3 R540
- KR 50 R2500
- KR 60-3
- KR 6-2
- KR 6-3
- KR 6 R700-2
- KR 6 R900-2
- KR 70 R2100
- KR 8 R1620
- KR 8 R1620 HP
- KR 8 R2010-2
- LBR iiwa iiwa 14 R820 *
- LBR iiwa iiwa 7 R800 *5
* Rapid IKはサポートされていません
-
YASKAWA
 対応モデル一覧
対応モデル一覧 -
FANUC
 対応モデル一覧
対応モデル一覧FANUC社ロボット 対応モデル

- ARC Mate 100iC/12
- ARC Mate 100iD
- ARC Mate 120iC
- CR-35iA
- CR-7iA
- CR-7iA/L
- CRX-10iA *
- CRX-10iA/L *
- CRX-20iA/L
- CRX-25iA *
- CRX-5ia *
- LR-10iA/10
- LR Mate 200iD
- LR Mate 200iD/4S
- LR Mate 200iD/7L
- M-1000iA
- M-10iA/10M
- M-10iA/10MS
- M-10iA/10S
- M-10iA/12
- M-10iA/12S
- M-10iA/7L *
- M-10iA/8L *
- M-10iD/12
- M-20iA
- M-20iA/20M
- M-20iA/35M
- M-20iB/25
- M-20iD/25
- M-20iD/35
- M-430iA/2P *
- M-430iA/2PH *
- M-710iC/12L
- M-710iC/20L
- M-710iC/45M
- M-710iC/50
- M-710iC/50S
- M-900iA/260L
- M-900iA-600F
- M-900iB/700
- P-40iA
- R-1000iA/100F
- R-1000iA/100F IF
- R-2000iA/165F
- R-2000iA/165F IF
- R-2000iB/165F
- R-2000iB/210F
- R-2000ic/125L
- R-2000iC/165F
- R-2000iC/165R
- R-2000iC/210F
- R-2000IC/210F IF
- R-2000iC/210L
- R-2000iC/210L IF
- R-2000iC/270F
- R-2000iD/100FH
- R-2000iD/100FH IF
* Rapid IKはサポートされていません
-
STÄUBLI
 対応モデル一覧
対応モデル一覧 -
KAWASAKI
 対応モデル一覧
対応モデル一覧 -
UNIVERSAL ROBOTS
 対応モデル一覧
対応モデル一覧 -
NACHI
 対応モデル一覧
対応モデル一覧 -
DENSO
 対応モデル一覧
対応モデル一覧 -
DOOSAN
 対応モデル一覧
対応モデル一覧 -
Robco
 対応モデル一覧
対応モデル一覧






▼ お問い合わせはこちらから ▼
06-6151-9283
- 商品検索:カテゴリ
- 産業用3Dセンサ・システム
- 産業用・協働ロボットの3D視覚誘導ガイド・ソリューション
- ビンピッキング・バラ積みピッキング Bin Picking Studio
