
- 商品検索:カテゴリ
- 3Dセンサ&ユニット
- 超音波を使ったドリフトのないmmレベルのインドアポジショニング 4D1 positioning system
2026年Q2リリース予定/パイロットテストステージ
超音波を使ったドリフトのないmmレベルのインドアポジショニング
シリーズ名
4D1 positioning system
シリーズ名
4D1 positioning system
デジタル作業ガイド、デジタルトレーニング、ロボットのナビゲーションに最適





- リアルタイムでmmレベルのポジショニング
- ヨーも含めドリフトがなく姿勢まで認識
- トラッカー数の制限がなく同時に複数のトラッキング
- 作業のリアルタイムで精密なデジタルサポート
- 正確な位置と姿勢情報によるロボットナビゲーション
- 環境ノイズの影響を受けにくく、トラッカー同士の混信がない

- 組み立て工程のデジタル化・デジタルマニュアル
- 組み立てステップ毎のデジタル・ガイダンス
- 間違った場合のアラートでミスを無くしリワークを削減
- 正しい組み立て工程の確認が可能
- 組み立て作業記録のデジタル化

- 産業用ロボットの姿勢も含んだティーチング
- AMR / AGVの向きも含んだナビゲーション
- 常に正確な位置と向きの把握が可能
- 工場内のデジタルツイン化
- ロボットの遠隔操作
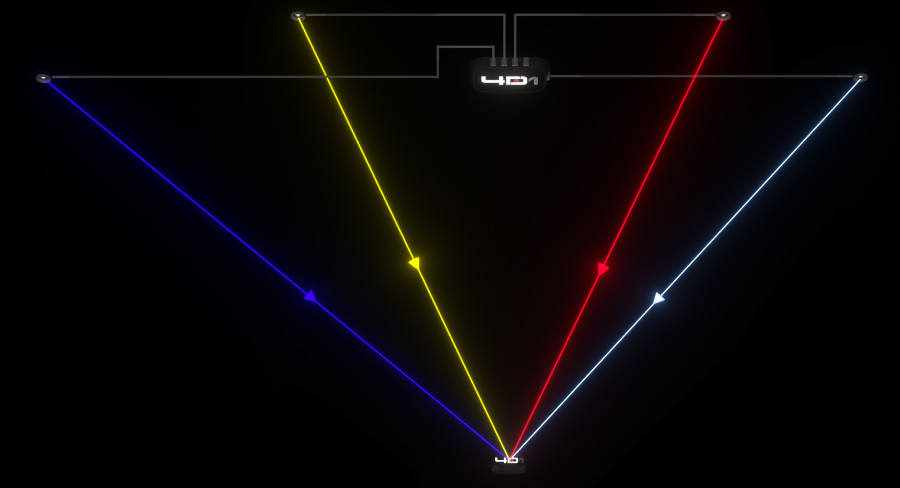
超音波マルチラテレーションと独自技術でドリフトのない精密なポジショニングと姿勢の把握
4D1社の精密インドアポジショニングシステムはマルチラテレーションをベースにした独自技術により信頼性と精度の高いポジショニングを提供します。
マルチラテレーションは、複数の基準点またはビーコンからの信号を三角測量することによって機能し、トラッカーの正確な位置を正確に決定し、堅牢で信頼性の高い位置情報を提供します。
マルチラテレーションはGPSの信頼性の要として機能しており、4D1社はその技術を利用し、複雑で変化する環境でも正確で信頼性の高い測位を保証します。
また独自の技術によりIMUを組み合わせるだけでは発生してしまうヨーのドリフトをなくし、姿勢まで認識できます。
さらに符号・周波数分割を組み合わせた独自の多元化技術により周辺環境からのノイズの影響を低減し、複数のトラッカーを使った場合も混信しない方式になっています。
仕様
| トラッカー寸法 | 99 × 46 × 21mm |
|---|---|
| トラッカー重量 | 105g |
| 位置精度 | 最大3mm |
| 姿勢精度 | <1° |
| アップデートレート | 20Hz(最大120Hz) |
| レイテンシ | 50ms |
| 最大距離 | 20m |
| 最大トラッカー数 | 制限なし |
| バックアップポジショニング | 有 |
| トラッカー物理インターフェース | ボタン(2か所)、ステータスLED |
| トラッカーインターフェース | USB-C(UART) |
| 充電ポート | USB-C |
| トラッカーバッテリー持続時間 | 12時間 |
| 動作環境温度 | -20 ~ 60℃ |
| 動作環境湿度 | 5 ~ 95%(結露ないこと) |
| 超音波帯域 | 20 ~ 60kHz |
| トラッカービーコン間通信 | Bluetooth(2.4GHz) |
リアルタイムで精密な位置姿勢トラッカー:T2

ミリメートルレベルのインドアポジショニングを可能にするトラッカー:T2は、キャリブレーションフリーで3次元の位置だけでなく姿勢(向き)までリアルタイムの把握を可能にするトラッカーです。
6軸の制御が重要となる機械制御や大型機器監視、ロボットアームのティーチングや作業者の腕や手の動きの把握/トレーニングに最適です。
ビーコンコントローラー:B0

ビーコンコントローラー:B0は、最大10個 のビーコンを同時に制御可能。どのビーコンを使っても精度は変わりません。
長距離ビーコン:S20

長距離ビーコン:S20は、100° の出力角で 最大20mまで 信号が届く
ビーコンです。
短距離広角ビーコン:S5

短距離広角ビーコン:S5は、180° の出力角で 最大5mまで 信号が届くビーコンです。
用途例

作業員の手、ひじ、目線(頭)などがミリメートルの精度で位置と向きが把握できると作業の正確な記録が可能になり、作業のサポートやトレーニングに使えるようになります。
位置だけでなく向き、姿勢まで正確にわかるようになるとロボットのティーチングが効率的になり、また高い正確性でロボットの制御が行えるようになります。

AGVやAMRといった物流、倉庫で活躍するロボットは自己位置を把握しながら作業しています。今までより正確な位置、向きが把握できるようになると、倉庫を効率的に使うことができるようになります。
- 商品検索:カテゴリ
- 3Dセンサ&ユニット
- 超音波を使ったドリフトのないmmレベルのインドアポジショニング 4D1 positioning system
