
- 商品検索:カテゴリ
- 産業用3Dセンサ・システム
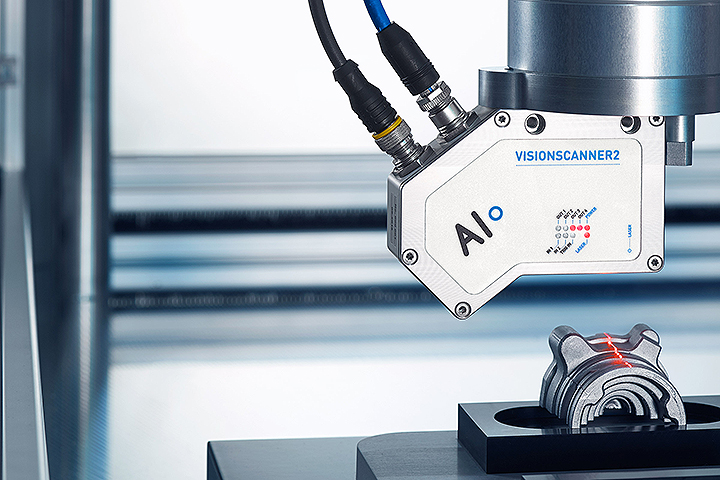
- ロボット連動型 高精度ガイドツール VISIONSCANNER2
ロボットアームでの形状計測と制御をワンパック化
「計測」「座標を修正」「正しい位置に移動」
ロボットアームの頭脳を担う次世代ガイドツール
シリーズ名
VISIONSCANNER2
シリーズ名
VISIONSCANNER2
VISIONSCANNER2 販売終了のご案内
EngRoTec社において12年以上にわたり販売していたVISIONSCANNER2が、
ハードウェア仕様の更新に伴い2024/12/31をもって販売終了となりました。
尚、新たに性能を大幅に向上させたVISIONSCANNER4が後継製品として2025年3月にリリース予定です。
VISIONSCANNER4では、GigE対応によるレスポンス性向上や、最大1000Hzのスキャンレート向上、センサ変更に伴う精度向上、光沢のある対象に強いブルーレーザーオプションの追加などの改善が予定されています。 また、使用するソフトウェアや制御方法はVISIONSCANNER2と同じですので、現状の使い勝手のまま、性能が向上した計測が実行可能になります。
新しくリリースされるVISIONSCANNER4の情報につきましては、更新あり次第公開させていただきます。
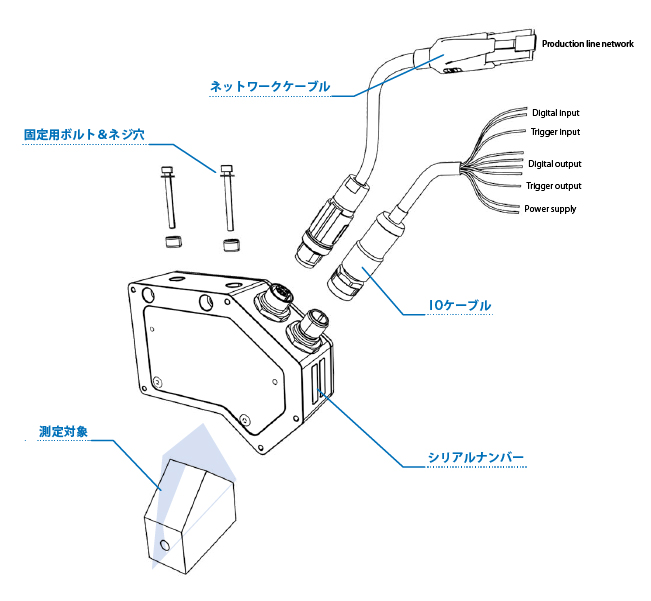
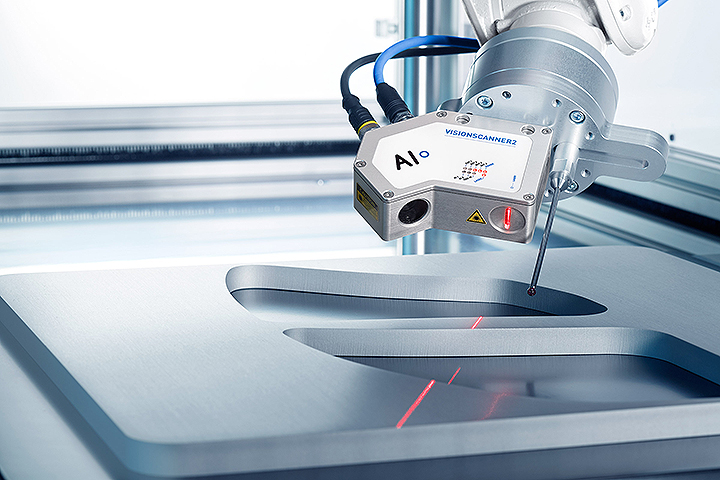
EngRoTec社のAI VISIONSCANNER2は光切断法による形状計測とロボットへの座標修正をワンパック化した小型高精度ガイドツールです。
光切断計測による測長、角度計測、円周計測、面積計測などの各種計測手法を組み合わせて、指定の閾値に対してOKやNG判別などが可能です。また、ロボットコントローラーとの連携のための座標管理にも対応。コントローラーから取得したロボットの現在位置と計測結果から導き出された対象物との距離、デバイス内に予めティーチされた対象物の座標マップを使い、本来の位置からのズレ量などをフィードバックする事でロボットに座標や角度修正の指示を出す事も可能です。TCP/IPやUDP、産業用イーサネット通信を利用してデータを送受信するコマンド制御機能を備え、オプションで各種ロボットコントローラーでの直接制御にも対応可能です。
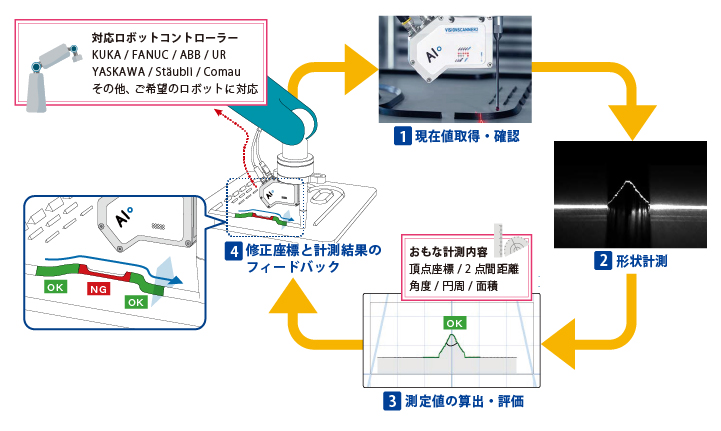
- KUKA
- FANUC
- ABB
- YASKAWA
- Staubli
- Comau
- UR
- その他、ご希望のロボットに対応可能
詳しくは担当までお問い合わせください。
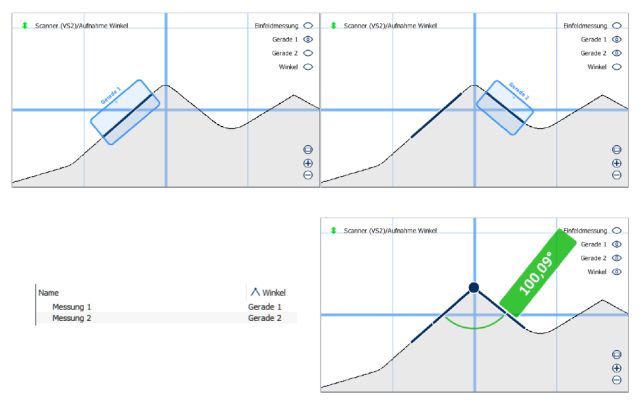
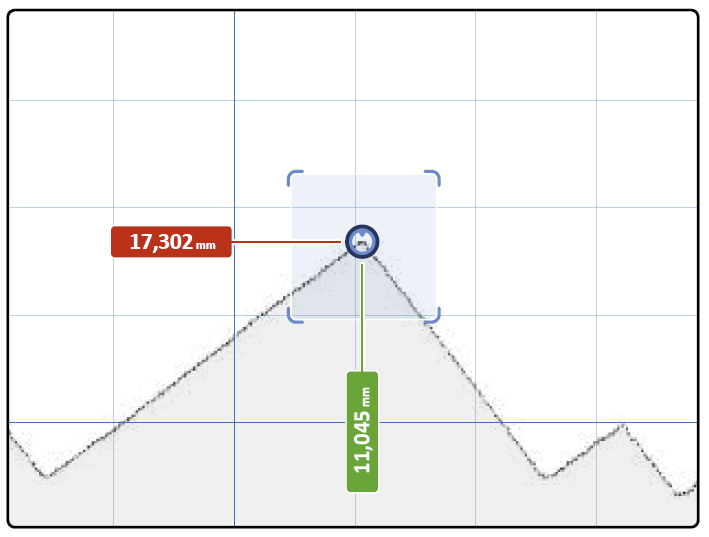
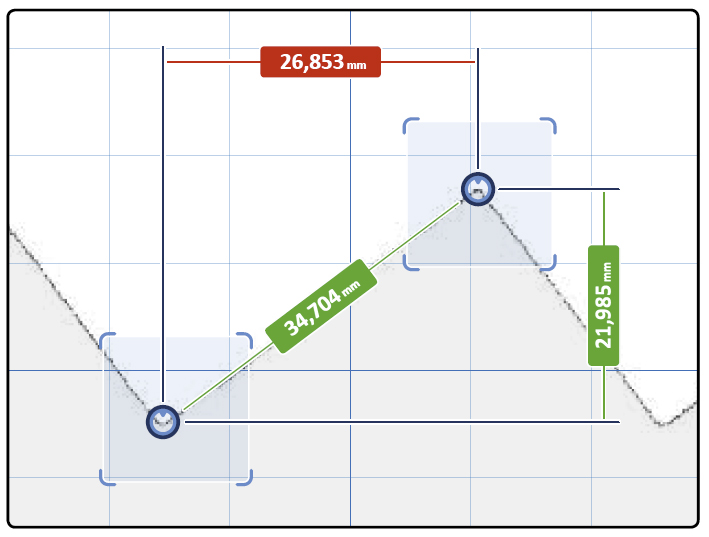
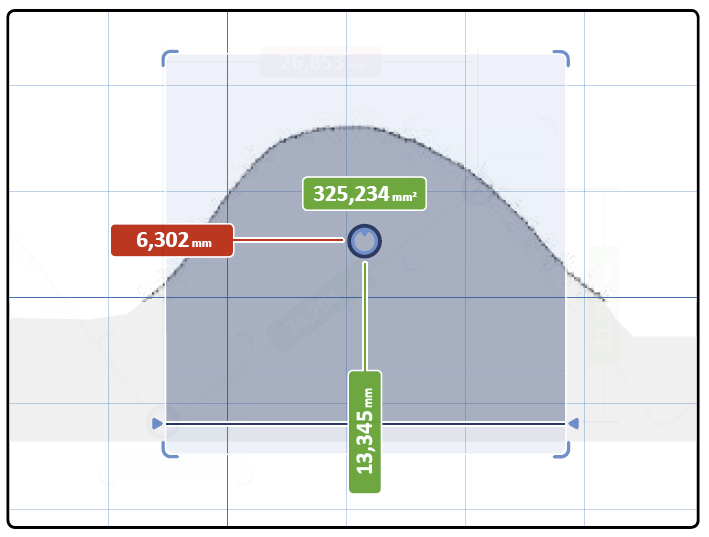
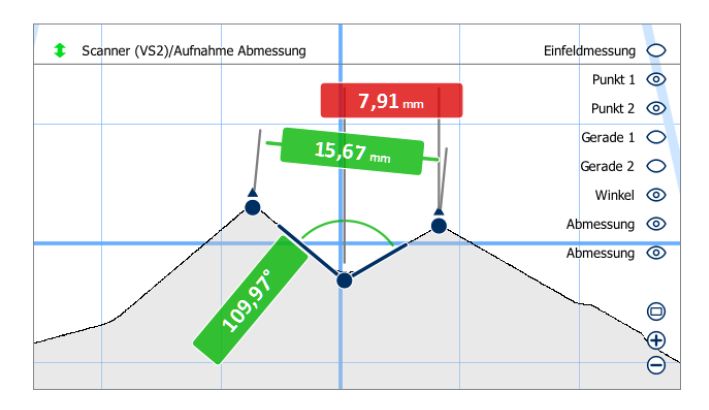
GUI上で設定範囲をドラッグ&ドロップ
VISIONSCANNER2にジョブを登録する付属ソフトウェアVISIONELEMENTS3は、GUIを使って測定範囲を設定する簡単ジョブ作成仕様。設定した範囲はドラッグ&ドロップや回転させる事で素早く修正を行ったり、数値入力で細かく修正を行う方法の両方に対応。
ライブ計測結果を見ながら設定を作り込む際に、素早い作業で設定を追加修正可能です。
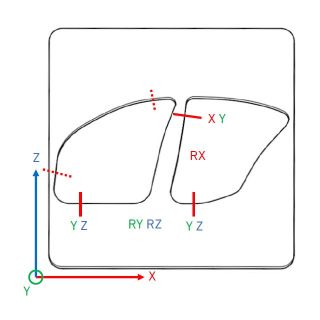
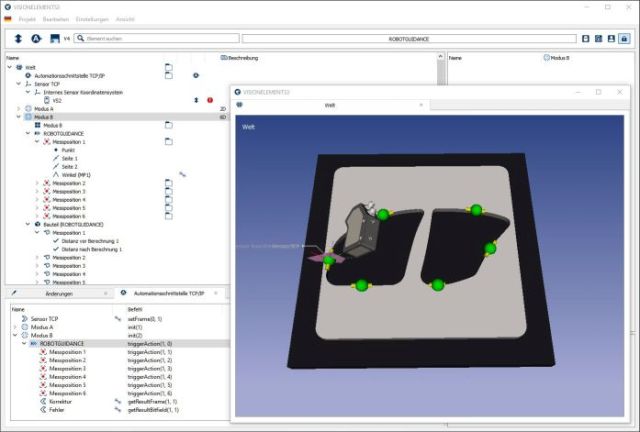
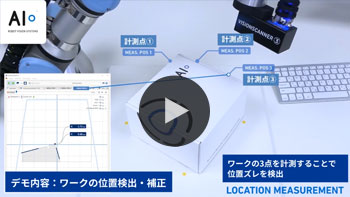
座標管理とフィードバックコマンド送信
VISIONELEMENTS3で行えるジョブにはVISIONSCANNER2を使った光切断による計測やIOコントロールだけではなくロボットガイダンス機能も備わっています。6Dによる座標管理機能とVRML三次元データの読み込みにより、視覚的に計測対象の位置を確認しながらVISIONSCANNER2での計測ポイントを設定可能。
計測結果に基づいて自動的に計測ポイントの座標が算出されます。
また、TCP/IPやUDP、産業用イーサネット通信を利用して計測した座標をフィードバックするためのコマンド送信機能も完備。
スキャニング結果に応じたロボット位置の修正制御も行えます。
その他、厳格なセキュリティとトレーサビリティに対応するためレベル分けでのアクセス管理に対応しており、SQLによる変更内容のログ記録やバックアップからのリストアも可能です。
設定の追加や修正は管理者権限を持つ者だけに留めて、一般ユーザーはジョブの切り替えだけと操作範囲を制限して悪意のある修正による想定外の動きをロボットにさせない事が可能です。
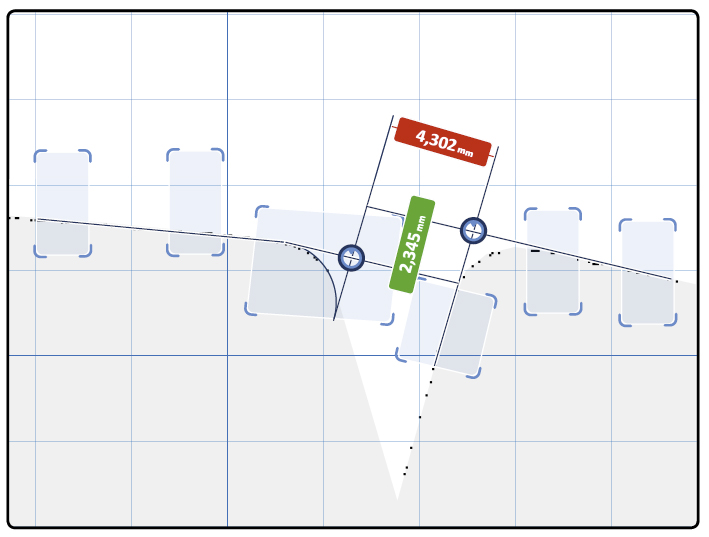
座標を修正してピックアップ
乱雑に並べて置かれている部品をロボットアームで搬送するには、部材に衝突しないためにも移動座標の細やかな調整が必要です。左の図のように並んで立て掛けられている板材をピックアップする際に、板材がどの程度傾いているのかをVISIONSCANNER2がスキャンして判断し、 ピックしやすい平面と平行になる位置へアーム位置を移動させる事で、スムーズなピックアップ作業を行わせる事が可能です。
光切断による三次元データだけではなく座標管理と修正およびフィードバックを行えるVISIONSCANNER2ならこれのみでそれらの作業を行えます。
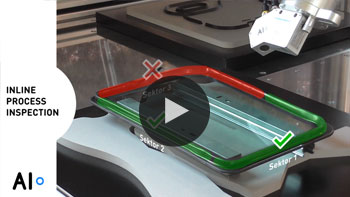
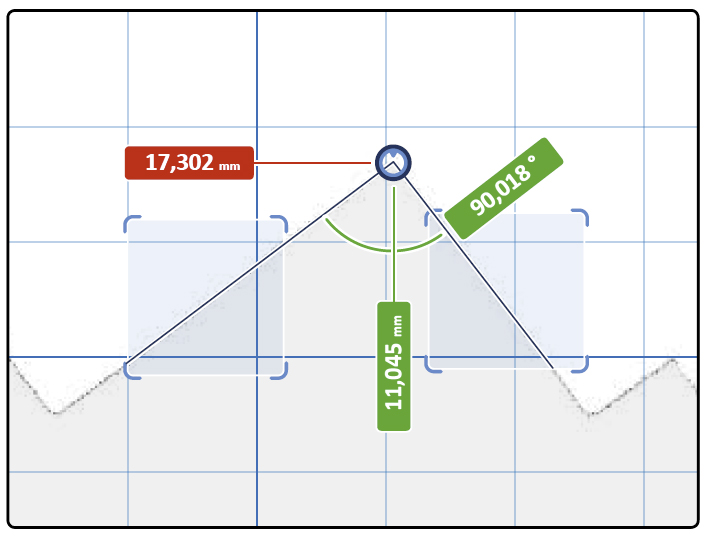
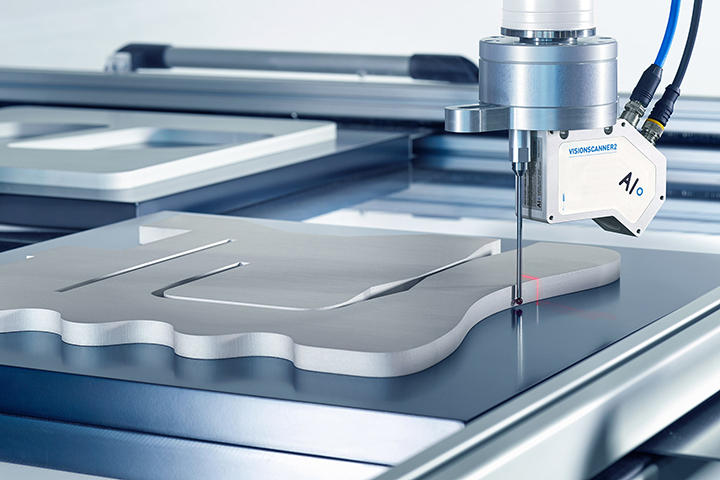
処理実行前後のアライメント確認
ワークに対して作業をする際に正しい位置にワークがセットされているかを確認するのは正確な作業を繰り返すロボットにとって重要です。左の図のように接着作業を行う際に設置したベースの指定ポイントのエッジ位置を確認してVISIONSCANNER2に登録されている座標との差を把握することで、正しい位置にベースが設置されているのかを把握し、接着剤塗布作業を続行させるかどうか判断が可能です。
また、接着後に再度エッジ位置を計測することで接着対象が正しく同じ位置に接着されたか差分を使って確認可能です。
モデルラインナップ
VISIONSCANNER2は3種類の測定画角と3種類のレーザー照射角の組み合わせによって測定範囲が変化します。
測定範囲はモデルごとの詳細ページでご確認ください。
| VS2-H | センサ解像度:1280×1024px | 詳細 >> |
|---|


- 商品検索:カテゴリ
- 産業用3Dセンサ・システム
- ロボット連動型 AI高精度ガイドツール VISIONSCANNER2
