
- 商品検索:カテゴリ
- 3Dセンサ&ユニット
- 3Dマッピングシステム Stencil2
コンパクト3Dマッピングユニット
製品名
Stencil2
製品名
Stencil2
GPSフリーで屋内外マッピング&ROS連携



- GPSフリーのマッピングシステム
- IMU内蔵(6DoF, 200Hz)
- 小型軽量設計
- 屋内・屋外にてマッピング可能
- 付属タブレットでリモート操作可能(Wi-Fi接続可能範囲内)
- ROS連携可能
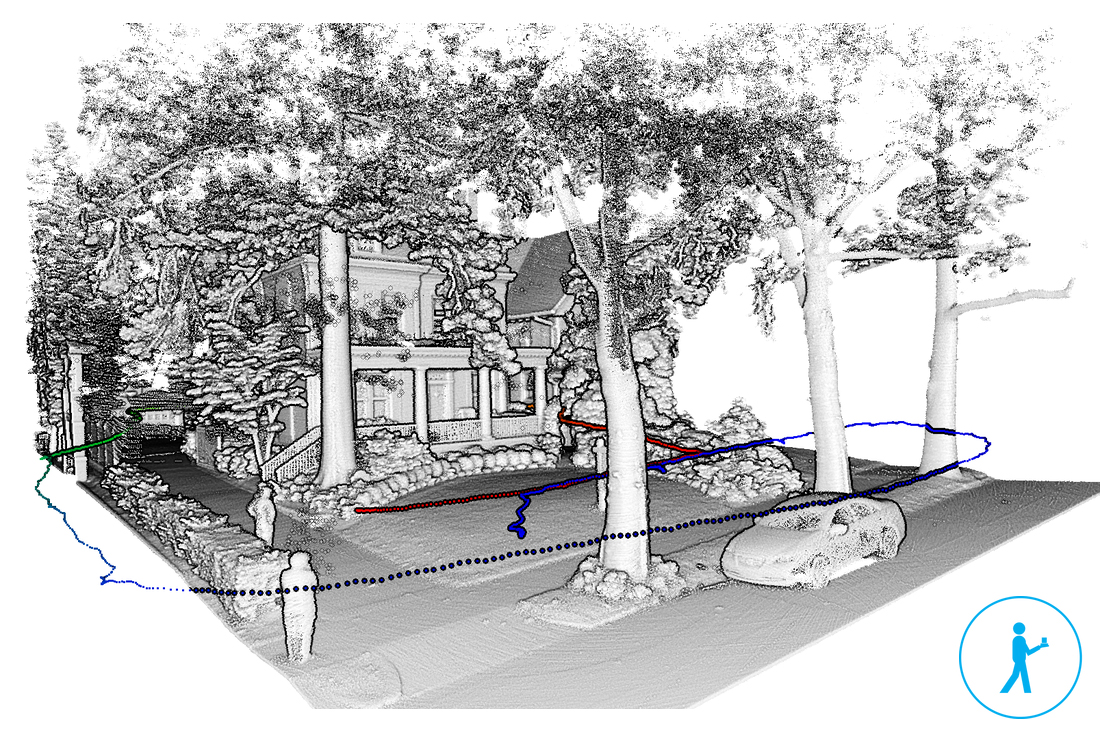
Near Earth Autonomy社のStencil2は、独自のリアルタイムローカライゼーション(自己位置推定)&マッピング(地図生成)アルゴリズムを実装した3Dマッピングユニットです。
3D-LiDARとカメラデータを統合処理し、非常に狭い環境や広いフィールド、特徴点が少ない場所においても、正確でロバストな3D点群マップを提供します。
GPS不要ですので、木やビルの陰に隠れる環境や屋内/地下空間での使用も問題ありません。車載での移動計測はもちろん、小型軽量なユニットですので、UAVへの搭載やバックパックシステム、ハンドヘルドでの使用を可能とします。ビル/橋梁/トンネル/道路などのインフラ検査維持管理、森林計測、文化財、その他3Dドキュメント作成を素早く低コストで行う事ができるスタンドアローンシステムです。
仕様
| 製品名 | Stencil2 |
|---|---|
| レーザー ※レーザー単体の仕様 |
測定距離:1~100m 測定点数:約300,000点/秒 視野 :360° × 30° 精度 :±3cm(1σ@25m) |
| カメラ | 640×360 @ 50Hz |
| IMU | 6DoF-MEMS X, Y, Z, Roll, Pitch, Yaw(Stencil2本体に内蔵) |
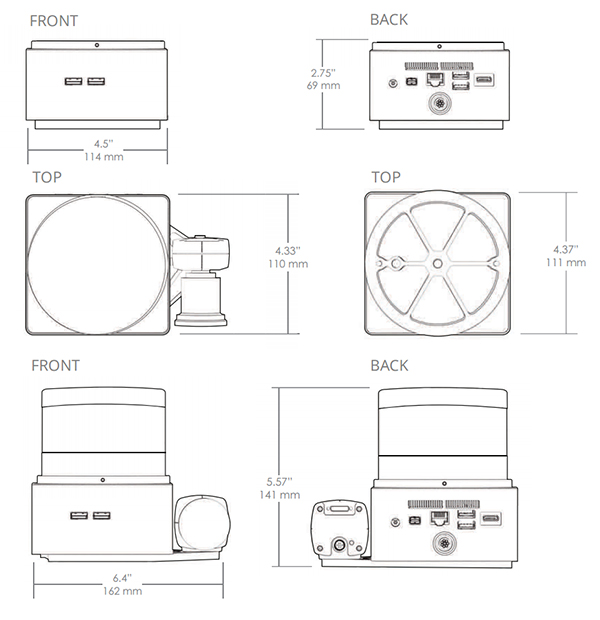
| 寸法 | 162 × 111 × 141mm |
| 重量 | 約1.5kg |
| 動作電源 | DC12~19V |
| ストレージ容量 | 1TB |
| ユニットインタフェース | USB3.0 ×4、LAN ×1、HDMI ×2 |
| プロセッサ | Intel NUC i7-Quad-Core |
| OS | Linux(Ubuntu16.04) |
| 出力ファイル | 3D点群マップ、軌跡(PLYフォーマット) |
| 付属品 | 収納ケース、ACアダプタ、タブレット、モバイルバッテリ |
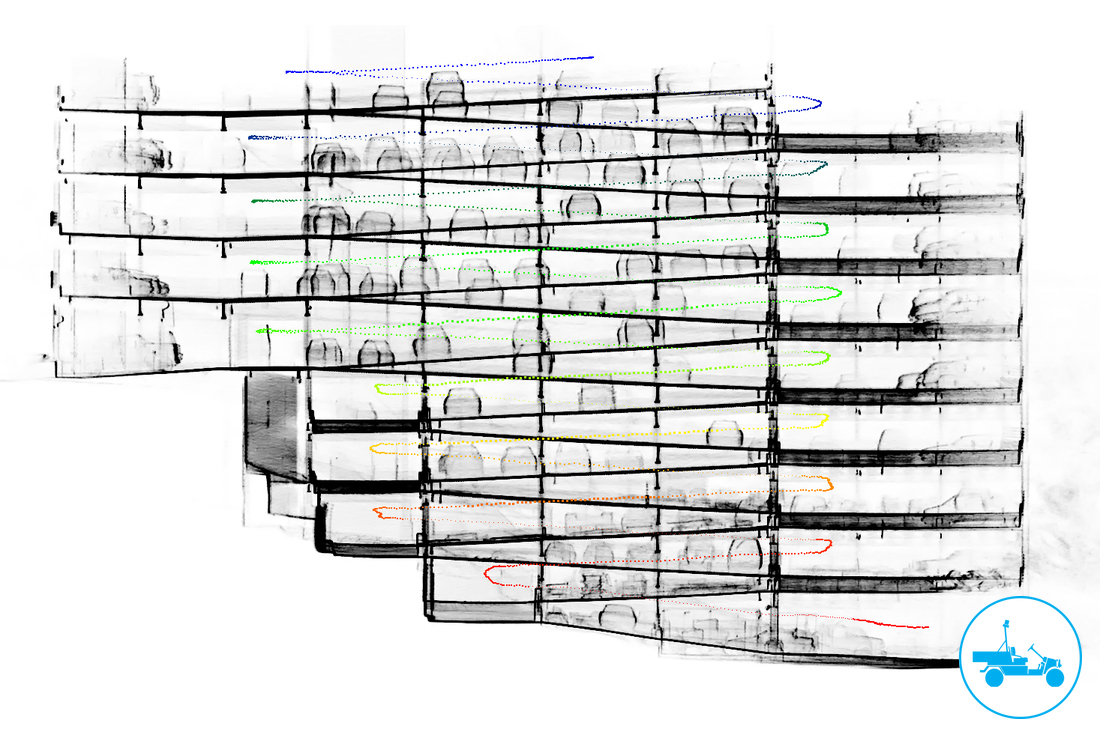
サンプルデータ
使用例
再生時間1分25秒
ドローン搭載例
再生時間2分26秒
広域マッピング
再生時間40秒(約40MB MP4形式)

サンフランシスコ ロンバード通り
再生時間11秒(約5.6MB MP4形式)

寸法図
価格
| 商品コード(型番) | 構成/内容 | 価格 |
|---|---|---|
| AR-Stencil2-VLP16-LM | Stencil2本体、カメラ、VLP-16、マッピング | お問い合わせ |
※注意事項
- 計測機とは異なり距離精度保証や機器動作安定性はございません。
- KAARTA社の廃業に伴い2023年2月よりNear Earth Autonomy社が販売サポートを引き継いでおります。
- 商品検索:カテゴリ
- 3Dセンサ&ユニット
- 3Dマッピングシステム Stencil2
