様々なロボットとの連動

- 商品検索:カテゴリ
- 産業用3Dセンサ・システム
- 産業用・協働ロボットの3D視覚誘導ガイド・ソリューション
- ワーク位置特定・自動ピッキング Locator Studio
ワーク位置特定・自動ピッキング
ソリューション名
Locator Studio
ソリューション名
Locator Studio
高精度3Dカメラ + 産業用・協働ロボットのソリューション

Photoneo社のLocator Studioは、あらゆる産業用ロボットやマニピュレーターのモデルとの高い互換性、簡単なプラグアンドプレイで動作する直感的なUIデザインの新しいロボットピッキング用ソフトウェアです。ロボット用のピッキングシステムを検討する際、周囲との衝突するリスクがなく、平面からワークをピッキングする用途であれば、最先端の3Dビジョンを活用したシンプルなソリューションで十分です。Locator StudioではPhotoneo社の3Dスキャナーでワークを計測、位置を特定して自動でロボットによるシンプルなピッキングを行うことができます。これによりピッキング速度の高速化、キャリブレーションと構成の簡易化、スキルセットへの要求の軽減など、多くのメリットが得られます。ベルトコンベアやラックから対象物をピッキング、また部品や冶具を正確に配置したりするような、衝突のない環境で位置を基準にしてロボットを誘導するアプリケーションに最適です。
ワーク位置特定・自動ピッキング
ロボットに対象物の位置ボーズを取得させます。
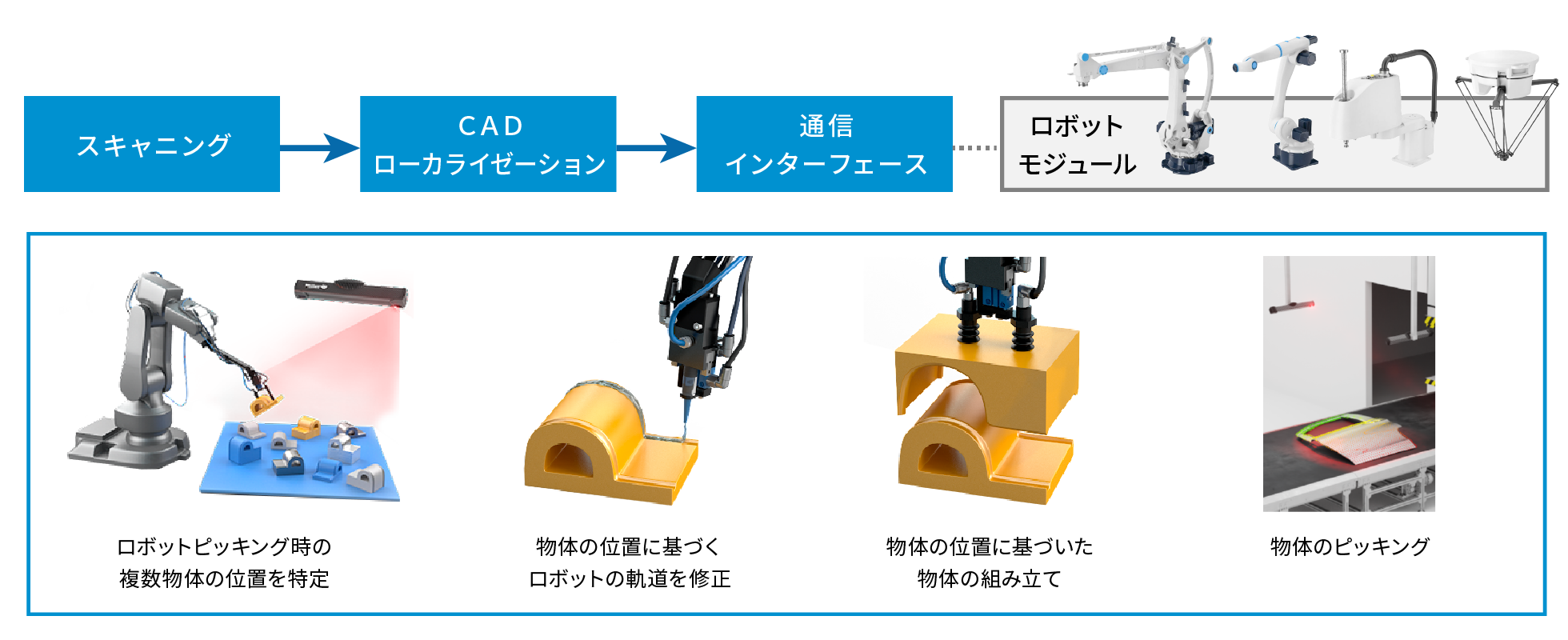
Locatorの特徴
シンプルなシステムで導入が簡単
複数の部品の位置を特定
測定環境の温度変化に強い
TCP/IP通信に対応
多くのアプリケーションで実証された
ワーク位置特定アルゴリズム
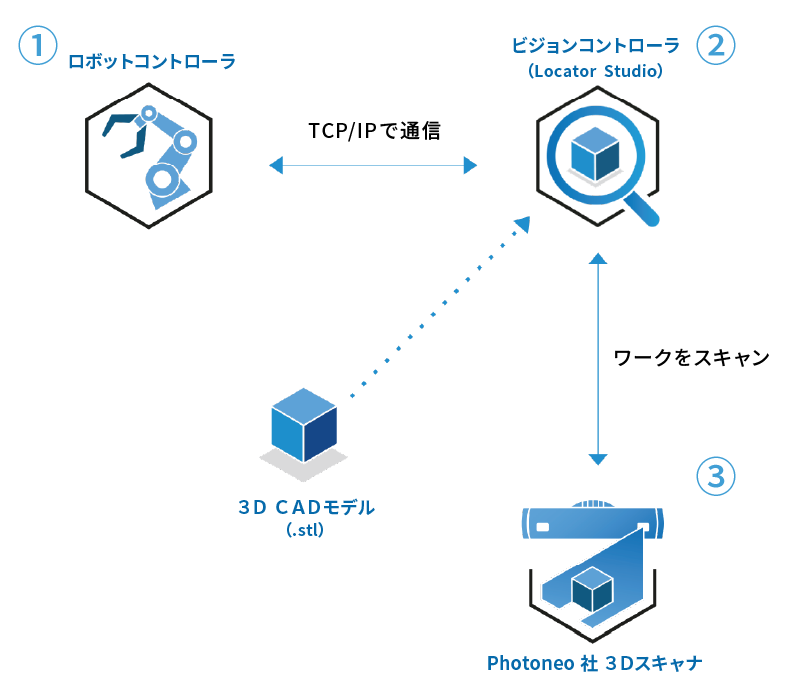
動作イメージ
- ①ロボットコントローラからビジョンコントローラ(Locator Studio)へワークの位置情報を要求
- ②ビジョンコントローラ(Locator Studio)がPhotoneo社3Dスキャナーへスキャンを指示
3D点群データを取得 - ③ビジョンコントローラ(Locator Studio)がワークの位置情報を特定
ロボットコントローラへ位置情報を送る
様々なロボットとの連動
Locator StudioはTCP/IPでロボットコントローラやPC、PLCと通信を行うことができます。これにより、あらゆるロボットマニピュレータを接続することができます。
-

6軸ロボット
-

デルタロボット
-

パレタイジングロボット
-

スカラロボット
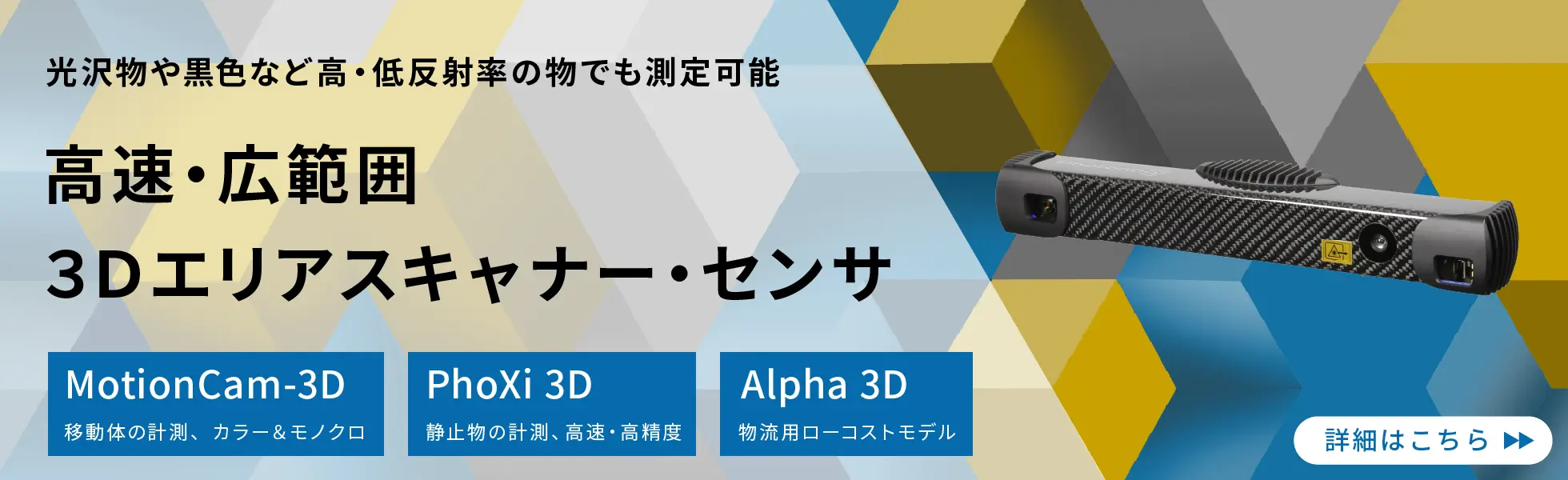
対応する3Dスキャナー・センサ
| 商品コード(型番) | 構成/内容 | 価格 | |
|---|---|---|---|
| ビジョンシステム | Locator Studio | ロケーション用ソフトウェア+ビジョンコントローラ | お問い合わせ |
| スキャナー | 3Dスキャナー・センサ | Photoneo社 MotionCam-3D / PhoXi 3D / Alpha 3D | お問い合わせ |
構成品目

オプション品
| 商品コード(型番) | 構成/内容 | 価格 | |
|---|---|---|---|
| ビジョンシステム (有償モジュール) |
AnyPick module for Boxes (Depalletization) | デパレタイズ用モジュール (Bin Picking / Locator Studio用) |
お問い合わせ |
| LayerPick module (Delayering) | ディレイヤー用モジュール (Locator Studio用) |
お問い合わせ | |
| MultiView module | マルチビュー用モジュール (Bin Picking / Locator Studio用) |
お問い合わせ |
▲タブのトップへ戻る
Locator Studioは、衝突回避を伴う高度なパスプランニングを必要とせず、ロボットが直接対象物に接近できるビジョンガイドロボティクスアプリケーションに最適なツールです。最も一般的なアプリケーションは、平らな面、地面、コンベア、ラックに積み重ねられた物体のピッキングです。
▲タブのトップへ戻る
▼ お問い合わせはこちらから ▼
お電話でのお問い合わせ
06-6151-9283
06-6151-9283
- 商品検索:カテゴリ
- 産業用3Dセンサ・システム
- 産業用・協働ロボットの3D視覚誘導ガイド・ソリューション
- ワーク位置特定・自動ピッキング Locator Studio
