
- 商品検索:カテゴリ
- 3Dセンサ&ユニット
- 3D-LiDARセンサ Hesai Technology
- 小型・高精度 XT-16/XT-32
小型・高精度 3D-LiDARセンサ デモ機・評価可能
製品名
XT16 / XT32
製品名
XT16 / XT32
独自開発のLiDARチップにより高性能なLiDARイメージングを実現



- 次世代の全方位・高精度三次元LiDARセンサ
- 水平360°と垂直30°の視野で120mまでの距離レンジ
- チャンネル数16と32ラインの2モデルをラインアップ
- 測定スピードは5 or 10 or 20Hz、マルチエコー対応
- 回転型とは思えない静動設計の機構
- PTP対応、小型・コンパクト設計、優れた環境性能
Hesai Technology社のXT16 / XT32は、独自開発のLiDAR-ASICを採用した次世代プラットフォーム搭載の高精度3D-LiDARセンサです。
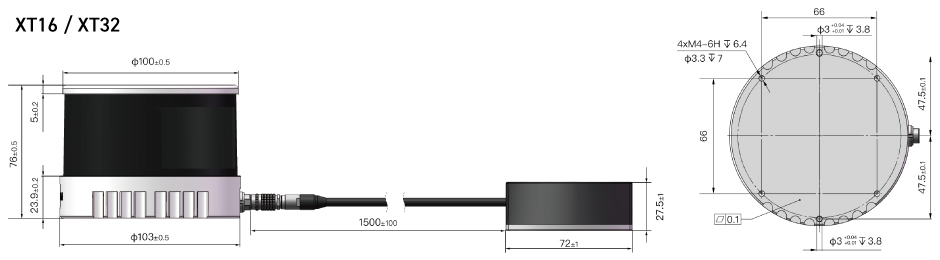
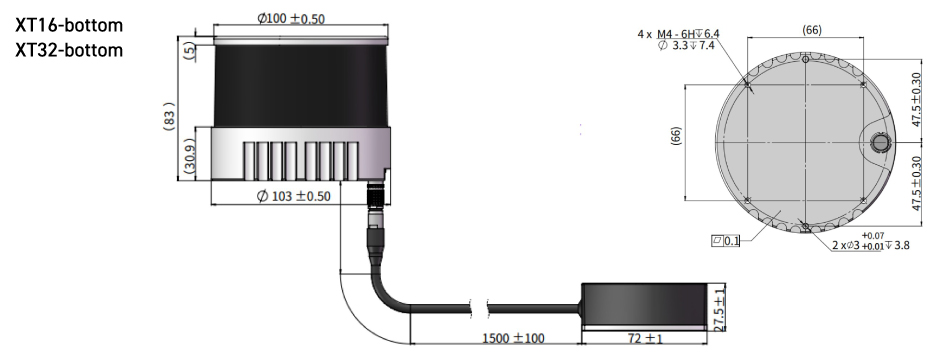
XT16は16個、XT32は32個のレーザー送受信センサ(Class 1 Eye Safe)を内蔵し、水平視野全方位360°、垂直視野はXT16が30°、XT32が31°(ロングレンジモデル40.3°)で3Dイメージングが可能です。測定精度は約±2cmで、他の一般的な回転型LiDARと比較し、取得した点群の誤差は半分以下になりました。測定距離は約120mで、ロングレンジモデルは250mまでの長距離測定に対応しています。近距離はゼロレベルからの測定が可能なため、センサに接触している遮蔽物も認識することができます。干渉ノイズ除去機能(特許)により他のセンサや外乱光の影響を受けにくい設計となっており、出力データはノイズの少ない綺麗な点群データです。また、ダイナミックレンジが広く、正確な反射率情報と正確な測距情報が取得できます。GPS PPS以外にも、PTP(PTPv2、gPTP)による他センサとの同期に対応しています。小型ヘッドの寸法は直径 103mm×高さ 76mmで重量は約0.8kgで、ロングレンジモデルは更に小型軽量となっています。様々な動作環境に対応する為に、温度・湿度、振動衝撃、耐霜、耐水、耐塵等の厳しい信頼性試験をクリアしています。
自動車、特殊車両、トラック、バス、ロボタクシー、農機、建機、AGV(無人搬送機)、AMR(自律走行搬送ロボット)、デリバリーロボット、セキュリティロボット、ドローン、UAVなどあらゆるプラットフォームに搭載され、自動運転、ADAS、自律走行、障害物検知、環境認識、3Dマッピング、SLAM、ナビゲーション、スマートシティ、人流計測、交通計測などの幅広いアプリケーションに活用されています。

| 商品コード(型番) | AR-XT-16 | AR-XT-32 | |
|---|---|---|---|
| チャンネル数 | 16 | 32 | |
| FOV 水平 | 360° | ||
| FOV 垂直 | 30°(-15° to +15°) | 31°(-16° to +15°) 40.3°(-20.8° to +19.5°)※ロングレンジバージョン |
|
| 測定距離 | 0.05 ~ 120m(80m@10% ref) |
0.05 ~ 120m(80m@10% ref) 0.5 ~ 250m(80m@10% ref)※ロングレンジバージョン |
|
| 測定スピード | 5 or 10 or 20Hz | ||
| マルチエコー | Single(Last or Strongest), Dual | ||
| 測定ポイント数 | Single | 320,000点/秒 | 640,000点/秒 |
| Dual | 640,000点/秒 | 1,280,000点/秒 | |
| 分解能 水平 | 0.09°(5Hz), 0.18°(10Hz), 0.36°(20Hz) | ||
| 分解能 垂直 | 2° | 1° | |
| 精度 | ±2cm | ±2cm ※ロングレンジバージョンはさらに高精度 |
|
| 干渉ノイズ除去機能 | あり | ||
| レーザークラス・波長 | 905nm , Class1 Eye Safe | ||
| 耐環境性能 | IP6K7 | ||
| サイズ・重量 | Φ103 × 76mm 0.8kg |
Φ103 × 76mm 0.8kg Φ93 × 75mm 0.49kg ※ロングレンジバージョン |
|
| 電源 | DC 9 ~ 36V | ||
| 消費電力 | 9W(typical) | 10W(typical) | |
| 動作温度 | -20℃ ~ 65℃ | ||
| インタフェース | 100Base-TX、UDP | ||
| 出力データ | 距離、回転角度、輝度 | ||
| データレート | Single | 12.2Mbps | 24.4Mbps |
| Dual | 24.4Mbps | 48.8Mbps | |
| 時刻同期 | GPS/PTP , gPTP | ||
| センサ設定 | WEB GUI , HTTP API | ||
| ソフトウェア | SDK、ROSドライバ(ROS1 ROS2) ビューワーソフトウェア付属(Windows 10 64bit , Ubuntu 16.04/18.04/20.04) |
||
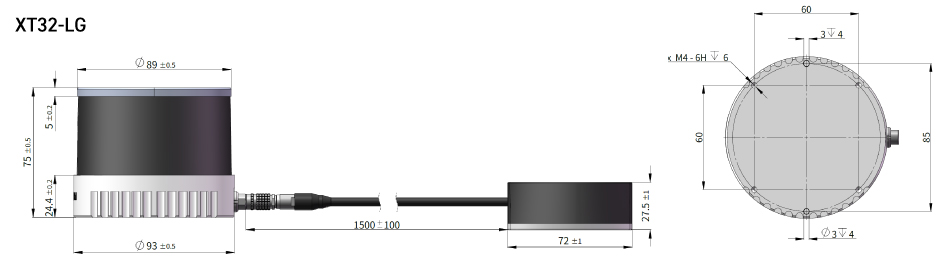
寸法図
![]() レーザーの送受信はHesaiで自社開発したASICを搭載し、LiDARの大幅な性能向上を実現しています。また、生産工程が簡易化できるようになり、製造コスト削減に寄与しています。
レーザーの送受信はHesaiで自社開発したASICを搭載し、LiDARの大幅な性能向上を実現しています。また、生産工程が簡易化できるようになり、製造コスト削減に寄与しています。
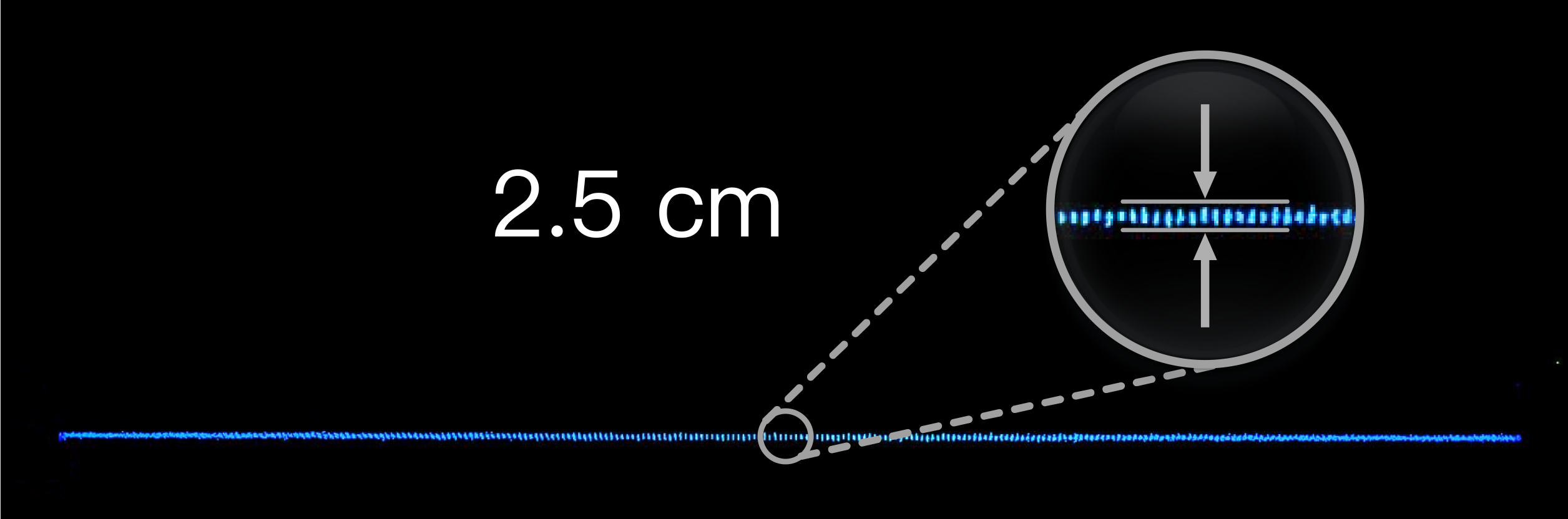
![]() LiDARマーケットにおける同等仕様の製品と比較して、優れた精度パフォーマンスを実現しています。
LiDARマーケットにおける同等仕様の製品と比較して、優れた精度パフォーマンスを実現しています。
![]() XTシリーズは、対象物がカバーに直接接触した状態でも、連続的に有効な点群を出力します。これにより、レンズの汚れや遮蔽を検出することができます。
XTシリーズは、対象物がカバーに直接接触した状態でも、連続的に有効な点群を出力します。これにより、レンズの汚れや遮蔽を検出することができます。
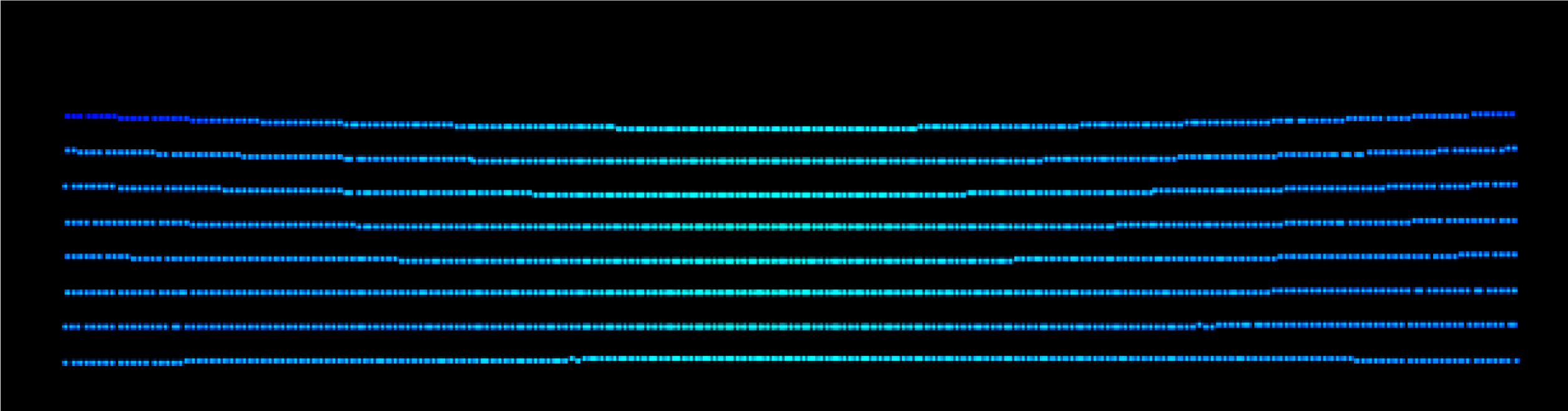
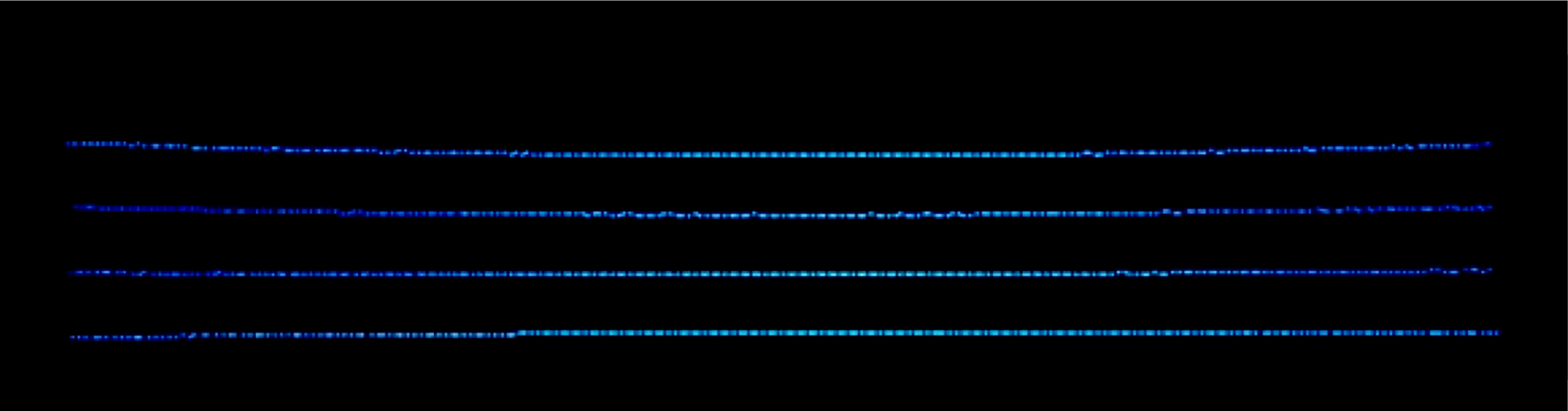
![]() XT32シリーズは、レーザーの本数を2倍に増やすことで、一般的なミッドレンジの16チャンネルのLiDARセンサと比較して解像度が向上しています。
XT32シリーズは、レーザーの本数を2倍に増やすことで、一般的なミッドレンジの16チャンネルのLiDARセンサと比較して解像度が向上しています。
![]() 最大120m(ロングレンジモデルは最大250m)の距離レンジに対応しています。反射率10%@80mのターゲットに対して、POD(Probability of Detection:検出確率)は90%以上です。
最大120m(ロングレンジモデルは最大250m)の距離レンジに対応しています。反射率10%@80mのターゲットに対して、POD(Probability of Detection:検出確率)は90%以上です。
![]() 独自開発の特許技術によって、すべてのパルスに個別のコードを与えることで、複数のLiDARセンサを近接させて使用した際に発生するノイズを取り除きます。
独自開発の特許技術によって、すべてのパルスに個別のコードを与えることで、複数のLiDARセンサを近接させて使用した際に発生するノイズを取り除きます。
![]() 広いダイナミックレンジに対応しており、安定した正確な反射率情報を提供します。
広いダイナミックレンジに対応しており、安定した正確な反射率情報を提供します。
![]() 高温動作、低温起動・動作、熱衝撃(気槽式)、振動、衝撃、湿熱サイクル、耐霜・耐水・耐塵など、厳しい信頼性試験をクリアしており、幅広い環境でご利用いただける堅牢な製品です。
高温動作、低温起動・動作、熱衝撃(気槽式)、振動、衝撃、湿熱サイクル、耐霜・耐水・耐塵など、厳しい信頼性試験をクリアしており、幅広い環境でご利用いただける堅牢な製品です。
![]() PTPのクロック精度は1μs以下、クロックドリフトは1μs/s以下です。PTPを使用することで、車両の配線が簡素化されます。
PTPのクロック精度は1μs以下、クロックドリフトは1μs/s以下です。PTPを使用することで、車両の配線が簡素化されます。
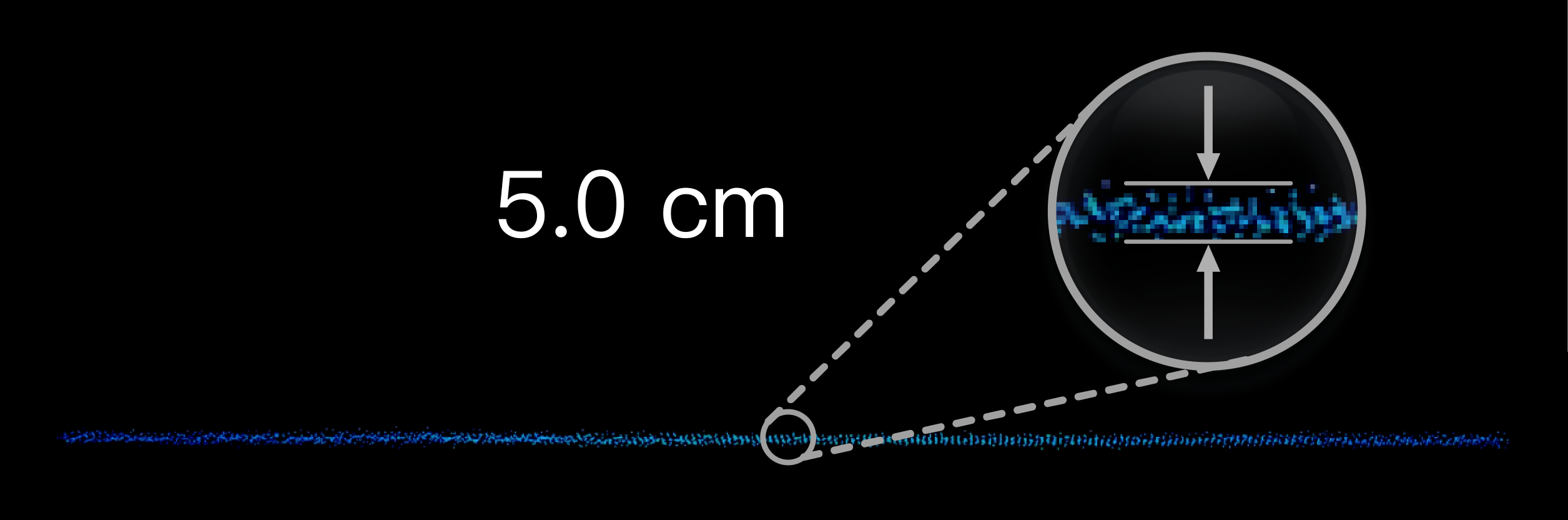
高精度
XT32で測定した壁の厚みは、16ラインの他社LiDARと比較し約半分で、2.5cmでした。
Front view
Top view
Hesai XT32
Front view
Top view
一般的な16チャンネルLiDAR
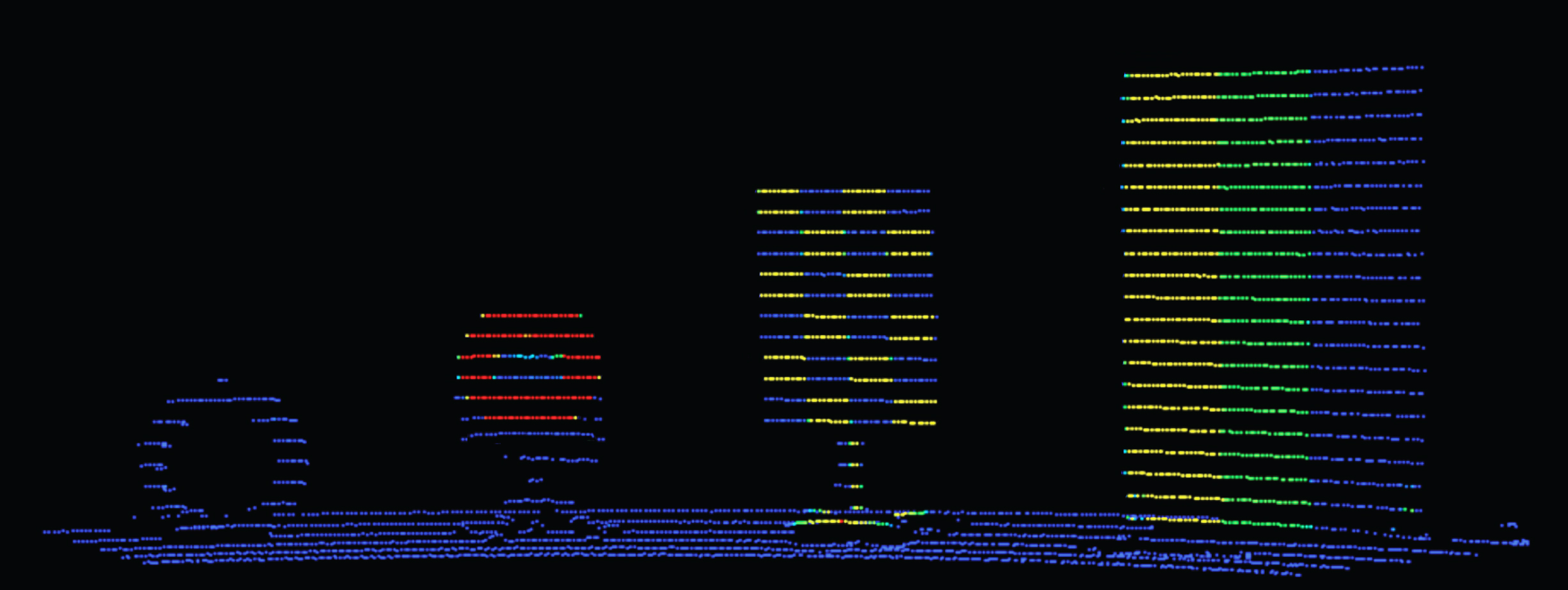
高品質な反射率情報
正確な反射率情報を提供します。以下は、カラー画像とXT32で取得したデータの比較画像です。スライドを動かしてご確認いただけます。
ターゲット(反射率):左から、タイヤ(5%)、道路標識(再帰反射、車:20%)、チェッカー(10%、90%)、テストボード(100%、50%、1.5%)

ゼロレベルの最小測定距離
測定距離0.05mからターゲットがセンサ筐体に接触しても、距離測定が可能で、ブラインドレンジはゼロです。

Hesai XT32
一般的な16チャンネルLiDAR
高解像度、長距離レンジ
XT32シリーズは、レーザーの本数を2倍に増やすことで、一般的なミッドレンジの16チャンネルのLiDARセンサと比較して解像度が向上しています。また、最大120m(ロングレンジモデルは最大250m)の距離レンジに対応しており、反射率10%@80mのターゲットに対して、POD(Probability of Detection:検出確率)は90%以上です。
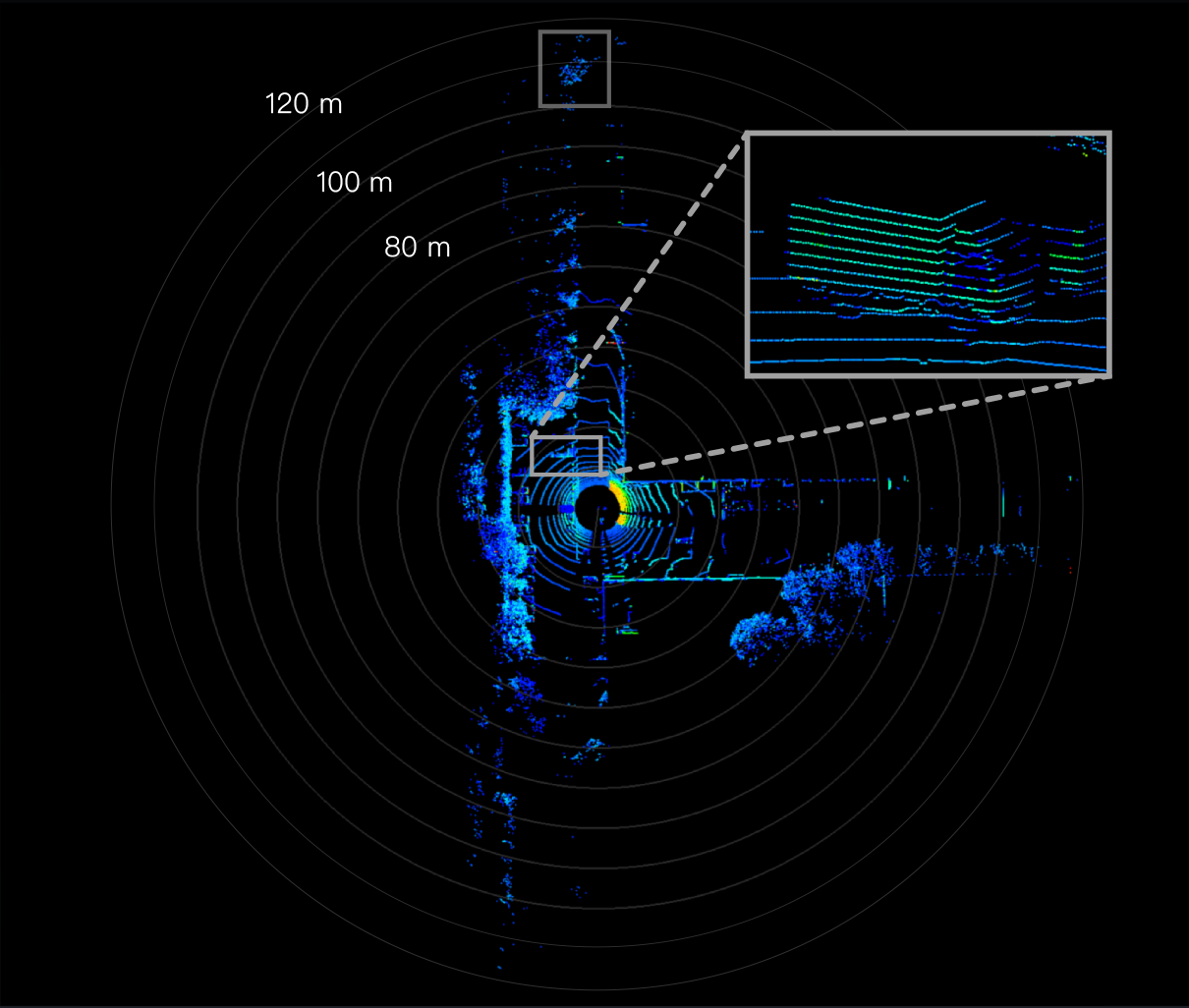
Hesai XT32
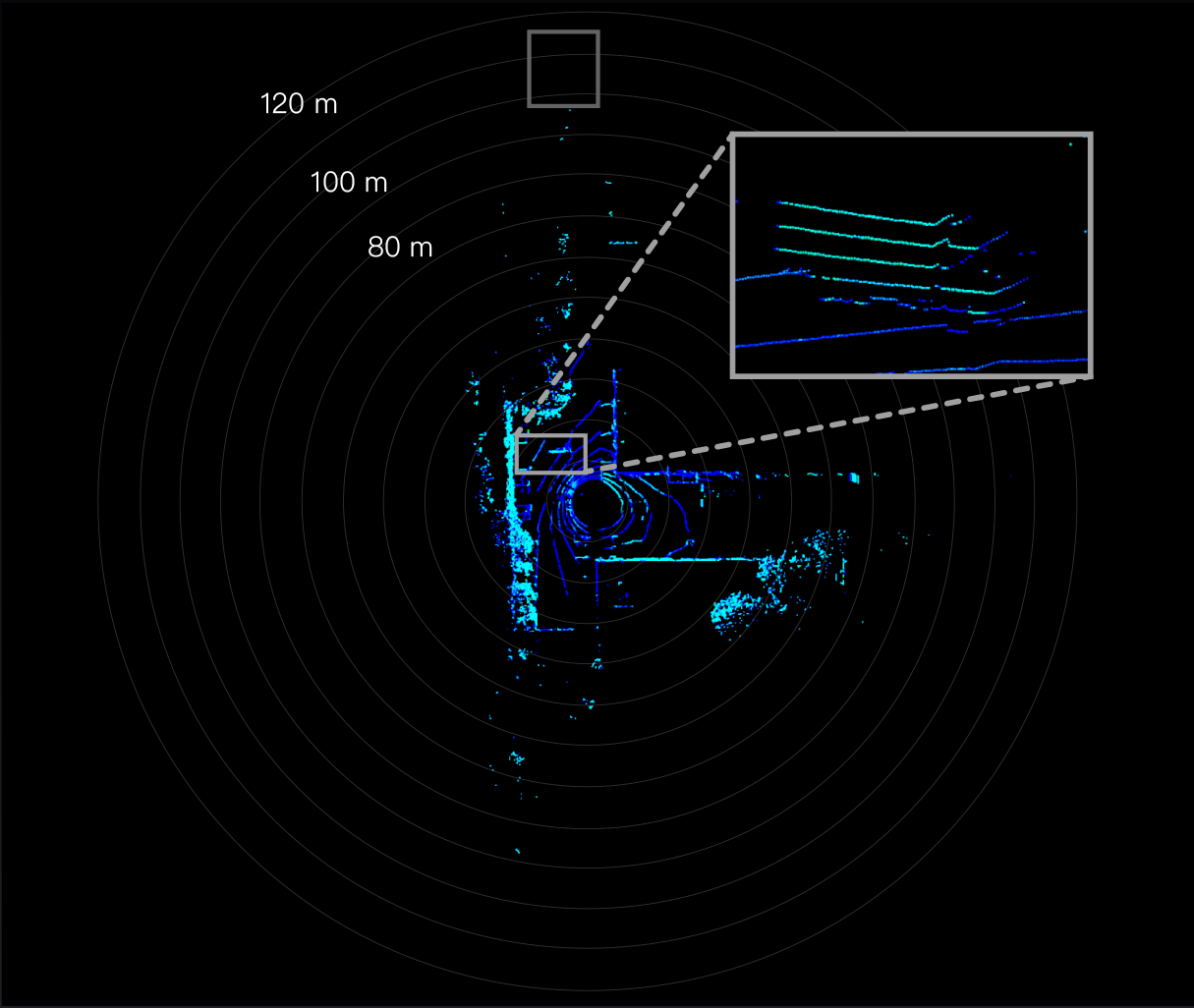
一般的な16チャンネルLiDAR
センサの各種パラメーター設定、機器情報の確認、アップグレードを行うためのWEB GUIが用意されています。
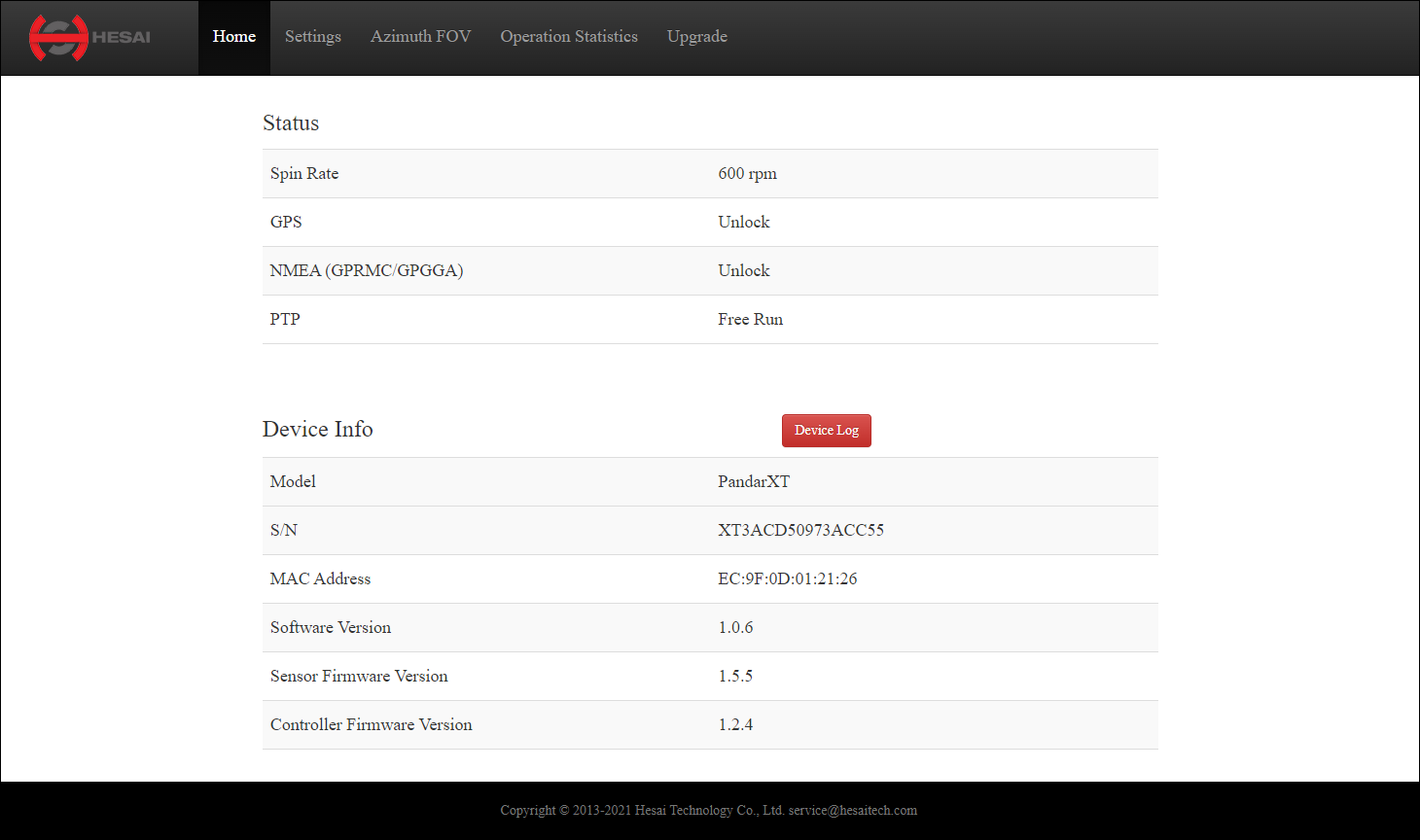
ステータス:回転数、GPS PSS、NMEA、PTP
デバイス情報:モデル名、シリアル番号、MACアドレス、ソフトウェアバージョン、センサファームウェアバージョン、コントローラーファームウェアバージョン、デバイスログ
-IP設定:
IPv4アドレス、IPv4サブネットマスク、IPv4ゲートウェイ、VLAN
-各種設定:宛先IP、宛先ポート番号、回転数(300/600/1200rpm)
リターンモード(シングル:Last、Strongest、First/デュアル:Last&Strongest、Last&First、First&Strongest)
PPS同期角度、レーザー照射方式(角度ベース/時間ベース)、時刻ソース(GPS/PTP)、NMEAセンテンス(GPRMC/GPGGA)、GPS宛先ポート、PTPプロファイル(1588v2/ 802.1AS)
反射率マッピング(Linear/Nonlinear)、中間点フィルタ、スタンバイモード
全チャネル共通:指定角度の情報のみ出力
複数セクションFOV:最大5つの角度範囲を設定することが可能
起動回数、内部温度、稼働時間、異なる温度帯での稼働状況
アップグレード(Upgrade)現行情報(ソフトウェアバージョン、センサファームウェアバージョン、コントローラーファームウェアバージョン)、アップグレードログ
ビューワーソフトウェア PandarView 2
Hesai Technology社のLiDARセンサからのポイントクラウドデータを表示・録画するためのソフトウェアです。
以下のOSバージョンでご利用いただけます。その他バージョンでのご利用の場合はお問合せください。
| PandarView 2 |  |
Window10 64ビット | V2.0.101 |  |
 |
Ubuntu 16.04/18.04/20.04 | V2.0.101 | |

- ・ライブ表示
- ・ライブデータの録画(.pcapファイル)
- ・録画データの再生
- ・エクスポート・インポート(補正ファイル、設定ファイル)
- ・点群トラック:タイムスタンプでの切取り、フレームでの切取り、詳細出力(指定エリア・フレームのCSV出力)
- ・座標・距離計測:30mグリッド、10m等距離円、定規、直行座標
- ・投影モード:正射投影、透視投影
- ・視点・回転:正面、背面、右面、左面、上面、回転
- ・チャンネル選択:チャンネル表示・非表示、チャンネルグループ作成
- ・ポイント選択・データテーブル表示:チャンネル番号、回転角度、距離、反射率、垂直角度、タイムスタンプ、座標XYZ、CSV出力
- ・その他表示制御:フィルタ(表示範囲設定)、レーザートレース(レーザービーム表示)、ステート情報(回転速度、リターンモード、.PCAPファイル名の表示)、カラーマップ、ポイントサイズ、リターンモード
| 商品コード(型番) | 構成内容 | 価格 | |
|---|---|---|---|
| AR-XT-16 | 小型・高精度 3D-LiDARセンサ XT16 | お問い合わせ デモ機・評価可能 |
|
| AR-XT-16-bottom | 小型・高精度 3D-LiDARセンサ XT16(底面コネクタ) | お問い合わせ | |
| AR-XT-32 | 小型・高精度 3D-LiDARセンサ XT32 | お問い合わせ デモ機・評価可能 |
|
| AR-XT-32-bottom | 小型・高精度 3D-LiDARセンサ XT32(底面コネクタ) | お問い合わせ | |
| AR-XT-32-LG | 小型・高精度 3D-LiDARセンサ XT32LG(ロングレンジバージョン) | お問い合わせ | |
| オプション | AR-XT-Plate | XT専用3脚マウントプレート(bottom非対応) | お問い合わせ |
| AR-XT-Cable2 | XT用延長ケーブル 2m | お問い合わせ | |
| AR-XT-Cable5 | XT用延長ケーブル 5m | お問い合わせ | |
| AR-XT-Cable10 | XT用延長ケーブル 10m | お問い合わせ | |
| AR-XT-CableRA | XT用ライトアングルケーブル 1.5m | お問い合わせ | |
製品構成

センサヘッド
接続BOX
(イーサネット、
電源、GPS)
イーサネット
ケーブル
電源アダプタ
ACケーブル
ビューワー
ソフトウェア
ユーザー
マニュアル
(日本語・英語)

- 商品検索:カテゴリ
- 3Dセンサ&ユニット
- 3D-LiDARセンサ Hesai Technology
- 小型・高精度 XT-16/XT-32
