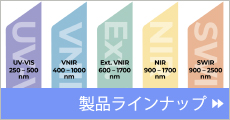
ハイパースペクトルセンサー・イメージ分光カメラ
シリーズ名
HyperSpecシリーズ
シリーズ名
HyperSpecシリーズ
ソフトウェア「HyperspecIII」
Headwall Photonics社の独自ソフトウェアは、分光データの取得だけでなく、スキャニングステージやパンチルトなどのデバイス制御、ドローンなどのUAV搭載時の測定も考慮され開発されています。
用途と対応機能に応じた5種類のデータ取得ソフトウェアと取得したデータを植物生育指標に変換するソフトウェアをランナップしています。
スターターキット、Pan-Tiltキットを同時に使用すれば、測定時の各スキャニング機構の動作制御も一括して管理することが可能です。
リモートセンシングパッケージとも非常に高い連動性を有しており、ソフトウェア上でのGPS信号の測定・管理、GPS/IMU信号を用いた画像歪み補正などが可能となります。
ソフトウェア概要
| HyperspecIII | リモートセンシングに最適な全機能を搭載したソフトウェアです。 センサー設定とデータ取得、GPS/IMUデータ統合機能、GPSトリガー機能、スペクトル情報表示、データ補正、変換機能が可能です。 |
|---|---|
| Labソフトウェア | スキャニングステージの制御が行えるソフトウェアです。取得データの表示、変換機能も有しています。 |
| Fieldソフトウェア | 回転ステージの制御が行えるソフトウェアです。取得データの表示、変換機能も有しています。 |
| AgView | 取得した分光データを植物生育指標に変換するためのソフトウェアです。 6種類の指標に対応しており、画像変換とGoogle Mapへのオーバーレイ表示が可能です。 |
機能一覧
| 機能一覧 | ソフトウェア | ||
|---|---|---|---|
| 機能 | 詳細 | HyperspecIII | Lab&Field |
| センサー設定 | フレームレート、露光時間、ホワイト/ダークリファレンス | ◆ | ◆ |
| リアルタイム表示 | 取得映像のリアルタイム表示 | ◆ | ◆ |
| データ取得 | 標準bil形式ファイル出力 | ◆ | ◆ |
| ステージ制御 | サポートデバイスの制御→オプション一覧参照 | ◆ | ◆ |
| スペクトル表示 | 取得データの表示、スペクトルグラフの表示 | ◆ | ◆ |
| GPSデータ統合 | 対応GPS/INS使用時 | ◆ | |
| ポリゴンツール&フライト計画 | GPSトリガー、フライト情報の設定 | ◆ | |
| Google Mapオーバーレイ | Google Mapに重ねて取得データを表示 | ◆ | |
| オルソ補正 | GPS/IMU情報を使用した歪み補正 | ◆ | |
| USGS高度マップ | ◆ | ||
| 放射輝度変換 | RAWデータから放射輝度へ変換 (要ラジオメトリック校正) | ◆ | ◆ |
| 反射率変換 | 放射輝度から反射率へ変換 (要ホワイトリファレンス) | ◆ | ◆ |
AgView VNIRセンサー用植物生育指数ソフト
| 指標 | 詳細 |
|---|---|
| クロロフィル含量 | レッドエッジ生育指数 |
| 広帯域緑度(Broadband Greenness) | NDVI(Normalized Difference Vegetation Index:正規化差植生指数) |
| 狭帯域緑度(Narrowband Greenness) | mND705(Modified Normalized Difference 705:修正正規化差指数) |
| 光利用効率 | PRI(Photochemical Reflectance Index:光化学反射指数) |
| 水蒸気量 | WBI(Water Band Index:植物水分状態指数) |
| 薄片状顔料 | MCARI(Modified Chlorophyll Absorption Ratio Index:修正クロロフィル吸収指数) |
センサー設定
カメラの撮影設定(フレームレート、露光時間)やキャリブレーション用にホワイト/ダークリファレンスを取得することができます。
ホワイトリファレンスは、撮影時のライト環境の情報を取得します。ダークリファレンスは、センサーの固定パターンノイズや暗電流を取得します。
これらの情報は、撮影後のデータ表示時に利用されます。

リアルタイム表示
現在センサーで取得している情報をリアルタイムで表示することが可能です。
左図:1ライン分の空間情報を垂直方向に分光したイメージです。
右図:Waterfall(ウォーターフォール)機能で、1ラインの空間情報を順次表示することができます。


ステージ制御
スターターキットやPan-Tilt(パンチルト)キットの操作制御を行うことができます。
スキャンの開始位置と終了位置を決め、スキャンのスピードを設定することができます。
ステージの設定とフレームレート・露光時間を調整し、撮影を行います。計算を行う機能もございます。



ポリゴンツール&フライト計画
リモートセンシングパッケージに含まれるGPS/IMUを同期させることで、高度、緯度、経度、X,Y,Z方向速度、Roll、Pictch、Yow角度、GPStimeの計測が可能です。
移動経路をマップ化することにより、測定領域の把握・整理の簡略化をサポート。GPSによる位置トリガーなどにも対応しています。

Google Mapオーバーレイ
オルソ補正したデータをGoogle Map上に重ねて表示することができます。
リモートセンシングパッケージに含まれるGPS/IMUの情報が必要となります。
オルソ補正
ラインスキャン型分光の欠点であったカメラ本体の揺れによる画像歪みに対して、GPS/IMUより正確なカメラの位置・傾きを計測することにより、画像を補正することが可能です。リモートセンシングパッケージに含まれるGPS/IMUの情報が必要となります。