
- 商品検索:カテゴリ
- 3Dセンサ&ユニット
- 高耐環境性広角ステレオ3Dセンサ MultiSenseシリーズ
- MultiSense KS21
高耐環境性超広角ステレオ3Dセンサ
製品名
MultiSense KS21
製品名
MultiSense KS21
超広角FOVステレオ3Dセンサ




- CPU & GPU搭載
- 使用温度環境:-30℃ ~ +65℃
- 耐振動・衝撃性能:10G/100G
- 防水防塵性能:IP67
- 200万画素モノクロカメラ×2、IRパターンプロジェクタ×2
- 超広角モノクロカメラFOV(単体):135°×84°
- ROS1 / ROS2 対応
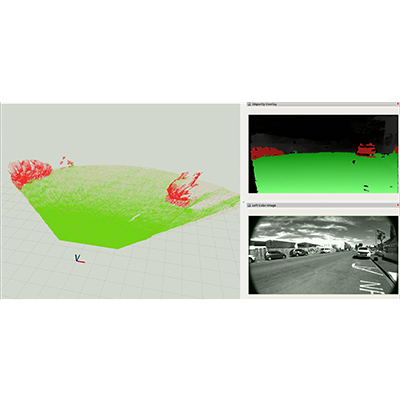
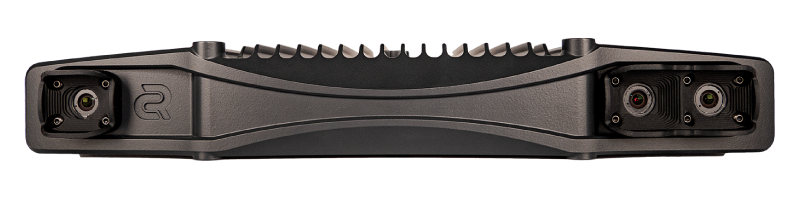
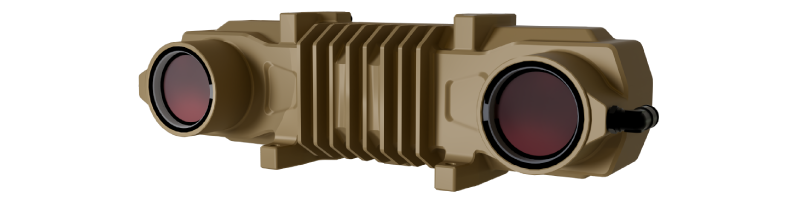
Carnegie Robotics社 の MultiSense KS21 は優れた耐振動・衝撃性能と防水防塵性能を持ち、FOVが135°×84°の超広角ステレオ3Dセンサです。センサ内にCPU & GPUを搭載し、ステレオマッチングや点群化処理 をセンサ内部で行いデータ出力するので、接続するPC側の計算処理負荷は最小限となります。ROS1/ROS2ドライバが用意されているのでセンサからのイメージデータ、デプスデータや点群等のROS Topicが使用可能です。
測距レンジ0.5m ~ 20m、使用環境温度 -30℃ ~ +65℃、耐振動・衝撃性能:10G/100Gと防水防塵性能IP67の高い環境性能を持っています。
厳しい環境で運用される建設機械、重機、農業機械、マイニングマシン、防衛特殊車両、自動搬送機やフォークリフトなどの産業機械、ラストマイルデリバリーロボットやAMRなど幅広いアプリケーションで使用いただけます。
| 商品コード | Multisense-KS21 |
|---|---|
| ステレオ用モノクロイメージセンサ | 1920×1280@9fps or 960×600@30fps ×2、グローバルシャッター FOV(H×V):135°×84° |
| ステレオビジョン | アルゴリズム:Semi-global stereo matching ベースライン:21cm アルゴリズム処理スピード:30fps @0.5MP, 256 Disparity 測距レンジ:0.5m ~ 20m 距離精度:±(距離m)^2/672(単位:m) 例:±0.04m at 5m 、±0.15m at 10m |
| IRパターンプロジェクタ | 波長:850nm ドット数:22,800 FOV(H×V):135°×51° |
| 耐環境性能 | 使用環境温度:-30℃ ~ +65℃ 防水防塵性能:IP67 耐振動・衝撃性能:10Grms / 100G 耐チッピング性アルミニウムハウジング 疎水コーテイングレンズ、RoHS対応 |
| オンボードプロセッサー | プロセッサー:Quad Core ARM A53 リアルタイム処理:ARM Cortex R5 GPU:ARM Mali-400 MP2 RAM:GB DDR4 w/ ECC OS:PetaLinux ロジックセル:最大150,000セル |
| インターフェイス | GigE(1000BASE-T)×1 |
| 電源 | 9–36VDC |
| 公称電力 | 12W |
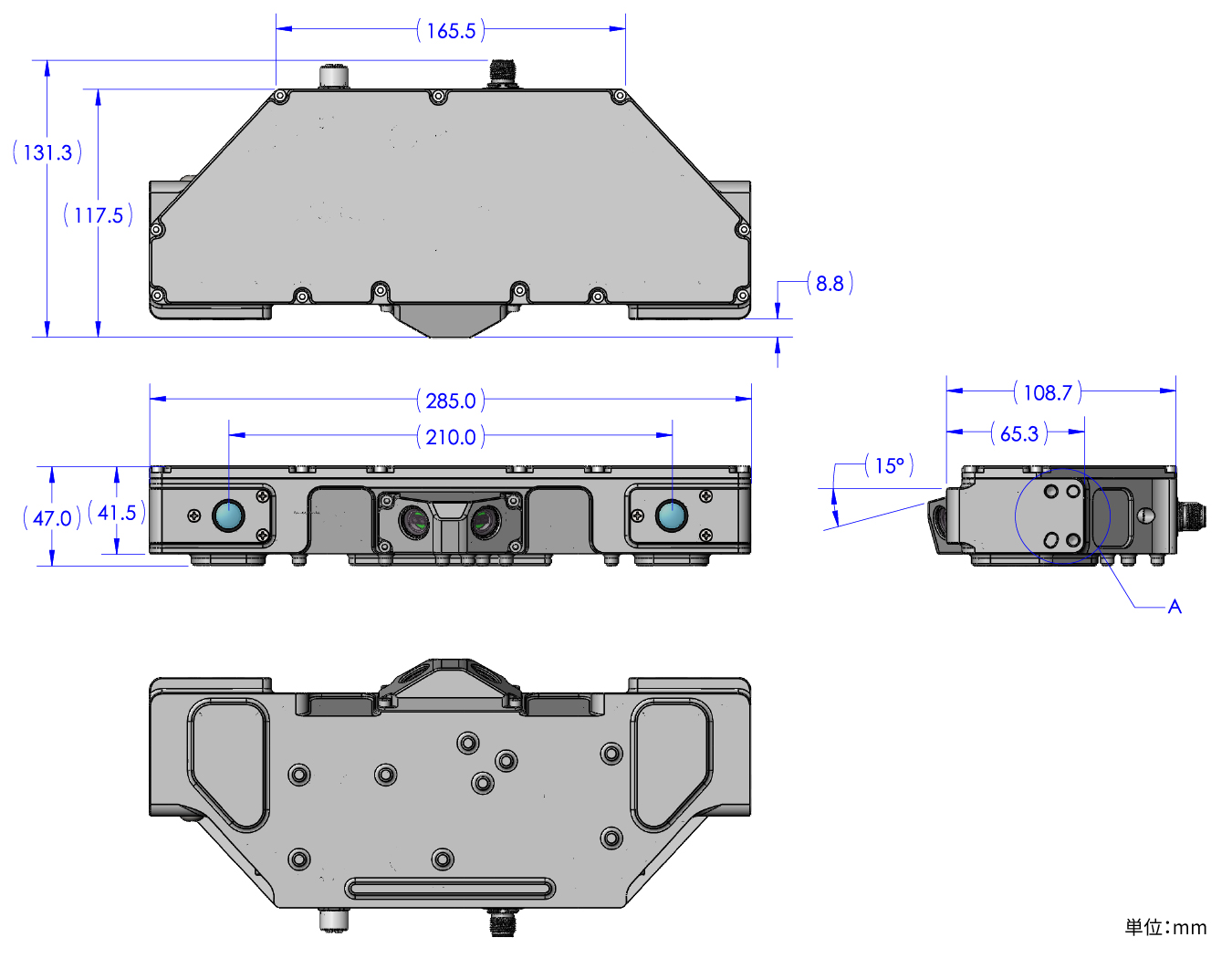
| サイズ(H × W × D) | 4.7cm × 28.5cm × 13.5cm |
| 重量 | 約1.1kg |
▲タブのトップへ戻る

関連製品:Carnegie Robotics社 高耐環境性広角ステレオ3Dセンサシリーズ ラインナップ


- 商品検索:カテゴリ
- 3Dセンサ&ユニット
- 高耐環境性広角ステレオ3Dセンサ MultiSenseシリーズ
- MultiSense KS21
