
- 商品検索:カテゴリ
- 3Dセンサ&ユニット
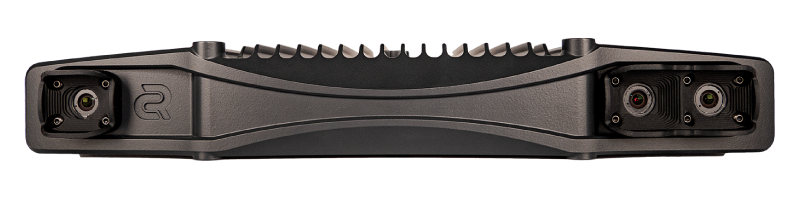
- 高耐環境性広角ステレオ3Dセンサ MultiSenseシリーズ
- MultiSense KS21i
廉価版 超広角ステレオ3Dセンサ
製品名
MultiSense KS21i
製品名
MultiSense KS21i
超広角FOVステレオ3Dセンサ・カラー点群出力可能






▲ 3Dモデルをマウス操作で全方向からご確認いただけます

- CPU & GPU搭載
- 使用温度環境:-30℃ ~ +65℃
- 耐振動・衝撃性能:10G/100G
- 200万画素モノクロカメラ×2、200万画素カラーカメラ×1
IRパターンプロジェクタ×2 - 超広角FOV(単体):135°×84°
- カラー点群出力対応
- ROS1 / ROS2 対応
Carnegie Robotics社 の MultiSense KS21i は堅牢なハウジングを持つ廉価版ステレオ3Dセンサです。センサ内にCPU & GPUを搭載し、ステレオマッチングやカラー点群化処理 をセンサ内部で行いデータ出力するので、接続するPC側の計算処理負荷は最小限となります。ROS1/ROS2ドライバが用意されているのでセンサからのイメージデータ、デプスデータやカラー点群等のROS Topicが使用可能です。
測距レンジ0.5m ~ 20m、使用環境温度 -30℃ ~ +65℃、耐振動・衝撃性能:10G/100Gの性能を持っています。
屋内自動搬送機、フォークリフト、AMRや業務用清掃ロボットなど幅広いアプリケーションで使用いただけます。
| 商品コード | Multisense-KS21i |
|---|---|
| ステレオ用モノクロイメージセンサ | 1920×1280@9fps or 960×600@30fps ×2、グローバルシャッター FOV(H×V):135°×84° 焦点距離:3.9mm F/2.6 |
| ステレオビジョン | アルゴリズム:Semi-global stereo matching ベースライン:21cm アルゴリズム処理スピード:30fps @0.5MP, 256 Disparity 測距レンジ:0.5m ~ 20m 距離精度:±(距離m)^2/672(単位:m) 例:±0.04m at 5m 、±0.15m at 10m |
| IRパターンプロジェクタ | 波長:850nm ドット数:11,400 FOV(H×V):135°×51° |
| カラーイメージセンサ | 1920×1188@30fps ×1、ローリングシャッター FOV:135°× 84° 焦点距離:3.9mm F/2.8 |
| 耐環境性能 | 使用環境温度:-30℃ ~ +65℃ 防水防塵性能:IP54 耐振動・衝撃性能:10Grms / 100G 耐チッピング性アルミニウムハウジング RoHS対応 |
| オンボードプロセッサー | プロセッサー:Quad Core ARM A53 リアルタイム処理:ARM Cortex R5 GPU:ARM Mali-400 MP2 RAM:GB DDR4 w/ ECC OS:PetaLinux |
| インターフェイス | GigE(1000BASE-T)×1 |
| 電源 | 9–36VDC |
| 公称電力 | 12W |
| サイズ(H × W × D) | 5.5 × 28.5 × 13.6cm ※3Dモデル(STEP)ダウンロード |
| 重量 | ー |

Automous Solutions
Nilfisk Liberty SC50 - 全自動フロア掃除ロボット
ROS1ドライバのインストール
mkdir -p multisense_ros1_driver/src cd multisense_ros1_driver/src source /opt/ros/noetic/setup.bash catkin_init_workspace . git clone --recurse-submodules https://github.com/carnegierobotics/multisense_ros.git cd multisense_ros1_driver rosdep install --from-paths src --ignore-src -r -y catkin_make
※ 上記は使用環境がROS Noeticの場合です。
ROS2ドライバのインストール
source /opt/ros/<ros2_distro>/setup.bash mkdir ros2_ws && cd ros2_ws git clone --recurse-submodules https://github.com/carnegierobotics/multisense_ros2 src colcon build source install/setup.bash
※ <ros2_distro>はご利用環境に合わせて変更してください。
もし使用環境に Xacro が入っていなければ、下のコマンドでインストールしてください。
sudo apt install ros-<distro>-xacro ros-<distro>-tf2-geometry-msgs
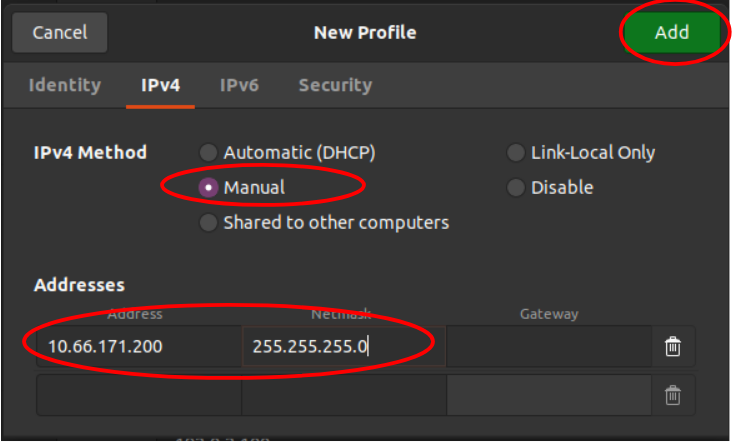
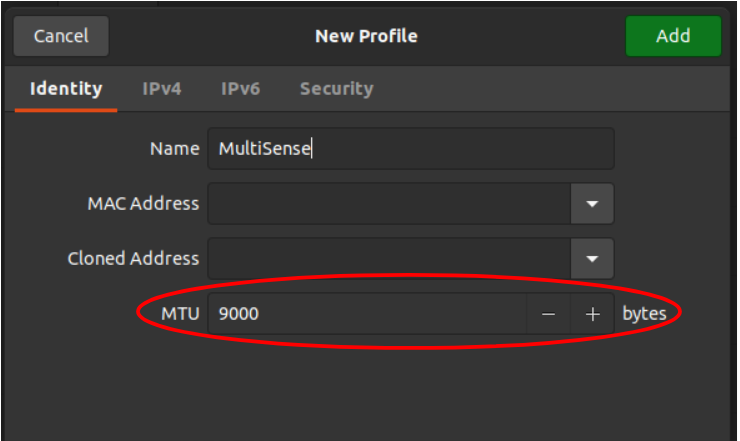
ネットワーク設定
MultiSenseの初期IPアドレスは 10.66.171.21 です。
PC側のIPアドレスは固定にして 10.66.171.xxx(21以外) に設定してください。MTUは 9000 にすることをオススメします。
ROS1ドライバの実行
ターミナルを開き、下のコマンドを実行してください。
source multisense_ros1_driver/devel/setup.bash roslaunch multisense_bringup multisense.launch
RQT Reconfigureでのカメラ設定
ターミナルを開き、下のコマンドを実行してください。
rosrun rqt_reconfigure rqt_reconfigure
Rvizでデータ可視化
ターミナルを開き、下のコマンドを実行してください。
rosrun rviz rviz
MultiSense向けにセットされた rviz設定 が Rvizウインドウ の File > Open Config から下のディレクトリにあるファイルをご利用可能です。
/multisense_ros1_driver/src/multisense/multisense_bringup/rviz_config.rviz
ROS2ドライバの実行
ターミナルを開き、下のコマンドを実行してください。
ros2 launch multisense_ros multisense_launch.py
RQT Reconfigureでのカメラ設定
ターミナルを開き、下のコマンドを実行してください。
ros2 run rqt_reconfigure rqt_reconfigure
カメラ設定のコマンドライン
ROS2ではReconfigureにてすべてのカメラ設定をカバーできていませんので、コマンドにて設定変更が必要です。
設定リストは下のコマンドで確認できます。
ros2 param list
コマンド例:フレームレート変更
ros2 param set /multisense/camera fps 30
コマンド例:解像度変更
ros2 param set /multisense/camera sensor_resolution "[1920, 1080, 256]"
関連製品:Carnegie Robotics社 高耐環境性広角ステレオ3Dセンサシリーズ ラインナップ


- 商品検索:カテゴリ
- 3Dセンサ&ユニット
- 高耐環境性広角ステレオ3Dセンサ MultiSenseシリーズ
- MultiSense KS21i
